Литература
- Введение в математическое моделирование. Учебное пособие. Под ред. П. В. Трусова. — М.: Логос, 2004. — ISBN 5-94010-272-7.
- Краснощёков П. С., Петров А. А. Принципы построения моделей. — издание второе, пересмотренное и дополненное. — М.: ФАЗИС; ВЦ РАН, 2000. — xii + 412 с. — (Математическое моделирование; Вып.1). — ISBN 5-7036-0061-8.
- Петров А. А., Поспелов И. Г., Шананин А. А. Опыт математического моделирования экономики. — М.: Энергоатомиздат, 1996. — 544 с. — 1500 экз. — ISBN 5-7036-0061-8.
- Дьяконов В. П. Matlab R2006/2007/2008. Simulink 5/6/7. Основы применения. Серия: Библиотека профессионала. — М.: Солон-Пресс, 2008. — 800 с. — ISBN 978-5-91359-042-8
- Огибалов П. М., Мирзаджанзаде А. Х. Механика физических процессов. — МГУ, 1976. — 370 с. — 3330 экз.
Универсальность моделей
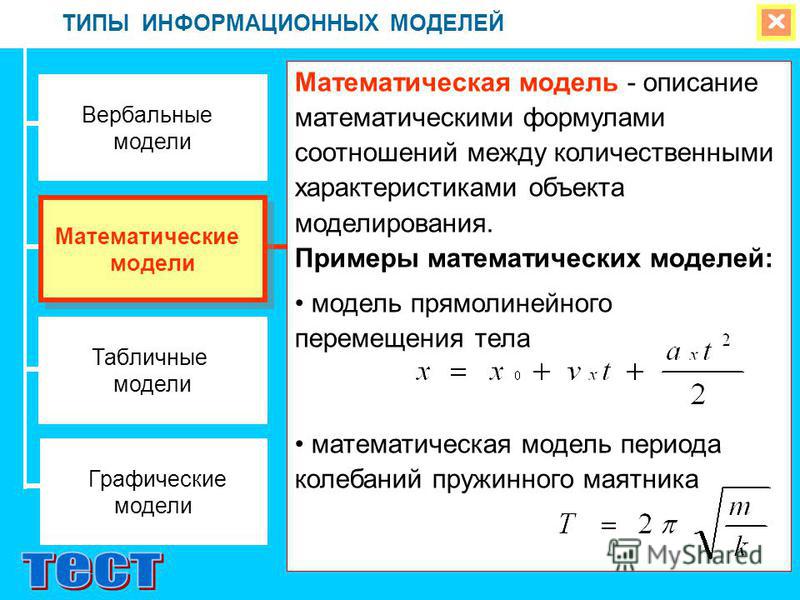
Важнейшие математические модели обычно обладают важным свойством универсальности: принципиально разные реальные явления могут описываться одной и той же математической моделью. Скажем, гармонический осциллятор описывает не только поведение груза на пружине, но и другие колебательные процессы, зачастую имеющие совершенно иную природу: малые колебания маятника, колебания уровня жидкости в
U{\displaystyle U}-образном сосуде или изменение силы тока в колебательном контуре. Таким образом, изучая одну математическую модель, мы изучаем сразу целый класс описываемых ею явлений. Именно этот изоморфизм законов, выражаемых математическими моделями в различных сегментах научного знания, подвиг Людвига фон Берталанфи на создание «общей теории систем».
Прямая и обратная задачи математического моделирования
Существует множество задач, связанных с математическим моделированием. Во-первых, надо придумать основную схему моделируемого объекта, воспроизвести его в рамках идеализаций данной науки. Так, вагон поезда превращается в систему пластин и более сложных тел из разных материалов, каждый материал задаётся как его стандартная механическая идеализация (плотность, модули упругости, стандартные прочностные характеристики), после чего составляются уравнения, по дороге какие-то детали отбрасываются как несущественные, производятся расчёты, сравниваются с измерениями, модель уточняется, и так далее. Однако для разработки технологий математического моделирования полезно разобрать этот процесс на основные составные элементы.
Традиционно выделяют два основных класса задач, связанных с математическими моделями: прямые и обратные.
Прямая задача: структура модели и все её параметры считаются известными, главная задача — провести исследование модели для извлечения полезного знания об объекте. Какую статическую нагрузку выдержит мост? Как он будет реагировать на динамическую нагрузку (например, на марш роты солдат, или на прохождение поезда на различной скорости), как самолёт преодолеет звуковой барьер, не развалится ли он от флаттера, — вот типичные примеры прямой задачи. Постановка правильной прямой задачи (задание правильного вопроса) требует специального мастерства. Если не заданы правильные вопросы, то мост может обрушиться, даже если была построена хорошая модель для его поведения. Так, в 1879 г. в Великобритании обрушился металлический Железнодорожный мост через Ферт-оф-Тей, конструкторы которого построили модель моста, рассчитали его на 20-кратный запас прочности на действие полезной нагрузки, но забыли о постоянно дующих в тех местах ветрах. И через полтора года он рухнул.
В простейшем случае (одно уравнение осциллятора, например) прямая задача очень проста и сводится к явному решению этого уравнения.
Обратная задача: известно множество возможных моделей, надо выбрать конкретную модель на основании дополнительных данных об объекте. Чаще всего структура модели известна, и необходимо определить некоторые неизвестные параметры. Дополнительная информация может состоять в дополнительных эмпирических данных, или в требованиях к объекту (задача проектирования). Дополнительные данные могут поступать независимо от процесса решения обратной задачи (пассивное наблюдение) или быть результатом специально планируемого в ходе решения эксперимента (активное наблюдение).
Одним из первых примеров виртуозного решения обратной задачи с максимально полным использованием доступных данных был построенный Ньютоном метод восстановления сил трения по наблюдаемым затухающим колебаниям.
В качестве другого примера можно привести математическую статистику. Задача этой науки — разработка методов регистрации, описания и анализа данных наблюдений и экспериментов с целью построения вероятностных моделей массовых случайных явлений. То есть множество возможных моделей ограничено вероятностными моделями. В конкретных задачах множество моделей ограничено сильнее.



Определения
Никакое определение не может в полном объёме охватить реально существующую деятельность по математическому моделированию. Несмотря на это, определения полезны тем, что в них делается попытка выделить наиболее существенные черты.
По Ляпунову, математическое моделирование — это опосредованное практическое или теоретическое исследование объекта, при котором непосредственно изучается не сам интересующий нас объект, а некоторая вспомогательная искусственная или естественная система (модель), находящаяся в некотором объективном соответствии с познаваемым объектом, способная замещать его в определённых отношениях и дающая при её исследовании, в конечном счёте, информацию о самом моделируемом объекте.
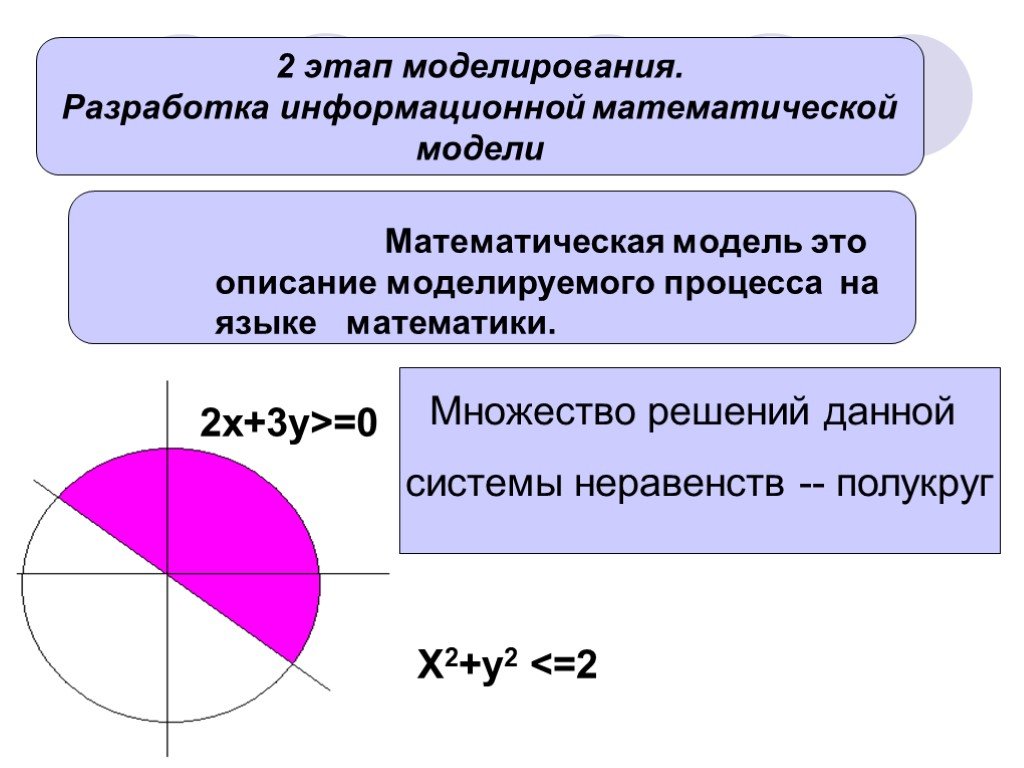
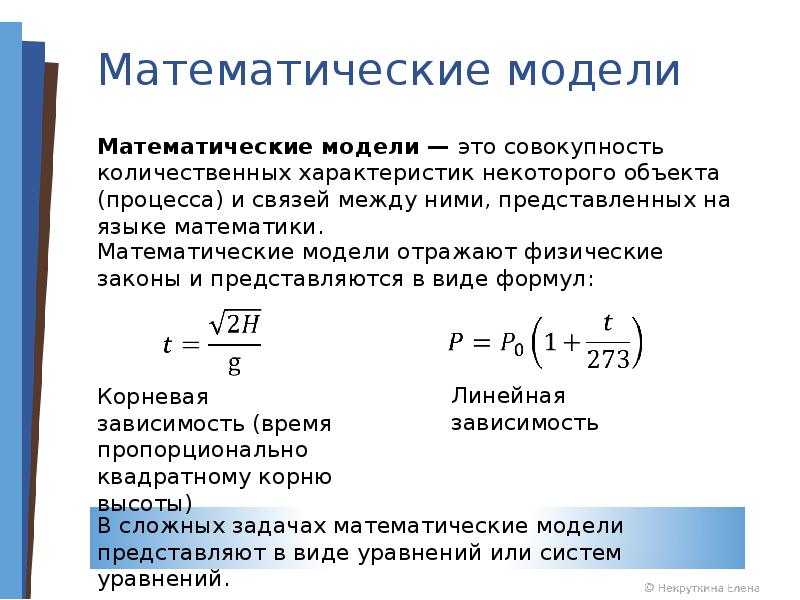
В других вариантах, математическая модель определяется как объект-заместитель объекта-оригинала, обеспечивающий изучение некоторых свойств оригинала, как «„эквивалент“ объекта, отражающий в математической форме важнейшие его свойства — законы, которым он подчиняется, связи, присущие составляющим его частям», как систему уравнений, или арифметических соотношений, или геометрических фигур, или комбинацию того и другого, исследование которых средствами математики должно ответить на поставленные вопросы о свойствах некоторой совокупности свойств объекта реального мира, как совокупность математических соотношений, уравнений, неравенств, описывающих основные закономерности, присущие изучаемому процессу, объекту или системе.
Жёсткие и мягкие модели
Гармонический осциллятор — пример так называемой «жёсткой» модели. Она получена в результате сильной идеализации реальной физической системы. Свойства гармонического осциллятора качественно изменяются малыми возмущениями. Например, если добавить в правую часть малое слагаемое −εx˙{\displaystyle -\varepsilon {\dot {x}}} (трение) (ε>{\displaystyle \varepsilon >0} — некоторый малый параметр), то получим экспоненциально затухающие колебания, если изменить знак добавочного слагаемого (εx˙){\displaystyle (\varepsilon {\dot {x}})} то трение превратится в накачку и амплитуда колебаний будет экспоненциально возрастать.
Для решения вопроса о применимости жёсткой модели необходимо понять, насколько существенными являются факторы, которыми мы пренебрегли. Нужно исследовать мягкие модели, получающиеся малым возмущением жёсткой. Для гармонического осциллятора они могут задаваться, например, следующим уравнением:
- mx¨=−kx+εf(x,x˙){\displaystyle m{\ddot {x}}=-kx+\varepsilon f(x,{\dot {x}})}.
Здесь f(x,x˙){\displaystyle f(x,{\dot {x}})} — некоторая функция, в которой может учитываться сила трения или зависимость коэффициента жёсткости пружины от степени её растяжения. Явный вид функции f{\displaystyle f} нас в данный момент не интересует.
Если мы докажем, что поведение мягкой модели принципиально не отличается от поведения жёсткой (вне зависимости от явного вида возмущающих факторов, если они достаточно малы), задача сведётся к исследованию жёсткой модели. В противном случае применение результатов, полученных при изучении жёсткой модели, потребует дополнительных исследований.
Если система сохраняет своё качественное поведение при малом возмущении, говорят, что она структурно устойчива. Гармонический осциллятор — пример структурно-неустойчивой (негрубой) системы. Тем не менее, эту модель можно применять для изучения процессов на ограниченных промежутках времени.



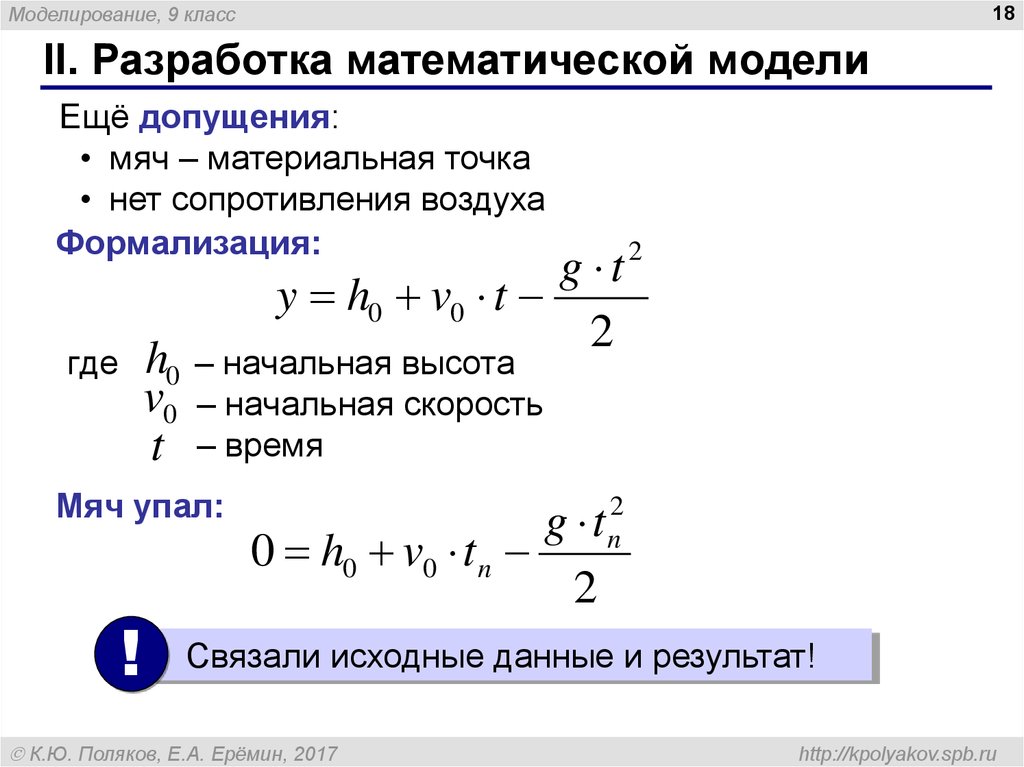
Пример
Рассмотрим механическую систему, состоящую из пружины, закреплённой с одного конца, и груза массой m{\displaystyle m}, прикреплённого к свободному концу пружины. Будем считать, что груз может двигаться только в направлении оси пружины (например, движение происходит вдоль стержня). Построим математическую модель этой системы. Будем описывать состояние системы расстоянием x{\displaystyle x} от центра груза до его положения равновесия. Опишем взаимодействие пружины и груза с помощью закона Гука (F=−kx{\displaystyle F=-kx}), после чего воспользуемся вторым законом Ньютона, чтобы выразить его в форме дифференциального уравнения:
- mx¨=−kx{\displaystyle m{\ddot {x}}=-kx},
где x¨{\displaystyle {\ddot {x}}} означает вторую производную от x{\displaystyle x} по времени: x¨=d2xdt2{\displaystyle {\ddot {x}}={\frac {d^{2}x}{dt^{2}}}}.
Полученное уравнение описывает математическую модель рассмотренной физической системы. Эта модель называется «гармоническим осциллятором».
По формальной классификации эта модель линейная, детерминистская, динамическая, сосредоточенная, непрерывная. В процессе её построения мы сделали множество допущений (об отсутствии внешних сил, отсутствии трения, малости отклонений и т. д.), которые в реальности могут не выполняться.
По отношению к реальности это, чаще всего, модель типа 4 упрощение («опустим для ясности некоторые детали»), поскольку опущены некоторые существенные универсальные особенности (например, диссипация). В некотором приближении (скажем, пока отклонение груза от равновесия невелико, при малом трении, в течение не слишком большого времени и при соблюдении некоторых других условий), такая модель достаточно хорошо описывает реальную механическую систему, поскольку отброшенные факторы оказывают пренебрежимо малое влияние на её поведение
Однако модель можно уточнить, приняв во внимание какие-то из этих факторов. Это приведёт к новой модели, с более широкой (хотя и снова ограниченной) областью применимости.
Впрочем, при уточнении модели сложность её математического исследования может существенно возрасти и сделать модель фактически бесполезной. Зачастую более простая модель позволяет лучше и глубже исследовать реальную систему, чем более сложная (и, формально, «более правильная»).







Если применять модель гармонического осциллятора к объектам, далёким от физики, её содержательный статус может быть другим. Например, при приложении этой модели к биологическим популяциям её следует отнести, скорее всего, к типу 6 аналогия («учтём только некоторые особенности»).
Дополнительные примеры
Модель Мальтуса
Согласно модели, предложенной Мальтусом, скорость роста пропорциональна текущему размеру популяции, то есть описывается дифференциальным уравнением:
- x˙=αx{\displaystyle {\dot {x}}=\alpha x},
где α{\displaystyle \alpha } — некоторый параметр, определяемый разностью между рождаемостью и смертностью. Решением этого уравнения является экспоненциальная функция x(t)=xeαt{\displaystyle x(t)=x_{0}e^{\alpha t}}. Если рождаемость превосходит смертность (α>{\displaystyle \alpha >0}), размер популяции неограниченно и очень быстро возрастает. В действительности этого не может происходить из-за ограниченности ресурсов. При достижении некоторого критического объёма популяции модель перестаёт быть адекватной, поскольку не учитывает
ограниченность ресурсов. Уточнением модели Мальтуса может служить логистическая модель, которая описывается дифференциальным уравнением Ферхюльста:
- x˙=α(1−xxs)x{\displaystyle {\dot {x}}=\alpha \left(1-{\frac {x}{x_{s}}}\right)x},
где xs{\displaystyle x_{s}} — «равновесный» размер популяции, при котором рождаемость в точности компенсируется смертностью. Размер популяции в такой модели стремится к равновесному значению xs{\displaystyle x_{s}}, причём такое поведение структурно устойчиво.
Система хищник-жертва
Основная статья: Система «хищник-жертва»
Допустим, что на некоторой территории обитают два вида животных: кролики (питающиеся растениями) и лисы (питающиеся кроликами). Пусть число кроликов x{\displaystyle x}, число лис y{\displaystyle y}. Используя модель Мальтуса с необходимыми поправками, учитывающими поедание кроликов лисами, приходим к следующей системе, носящей имя модели Лотки — Вольтерры:
- {x˙=(α−cy)xy˙=(−β+dx)y{\displaystyle {\begin{cases}{\dot {x}}=(\alpha -cy)x\\{\dot {y}}=(-\beta +dx)y\end{cases}}}
Поведение данной системы не является структурно устойчивым: малое изменение параметров модели (например, учитывающее ограниченность ресурсов, необходимых кроликам) может привести к качественному изменению поведения.
При некоторых значениях параметров эта система имеет равновесное состояние, когда число кроликов и лис постоянно. Отклонение от этого состояния приводит к постепенно затухающим колебаниям численности кроликов и лис.




Возможна и противоположная ситуация, когда любое малое отклонение от положения равновесия приведёт к катастрофическим последствиям, вплоть до полного вымирания одного из видов. На вопрос о том, какой из этих сценариев реализуется, модель Вольтерры — Лотки ответа не даёт: здесь требуются дополнительные исследования.
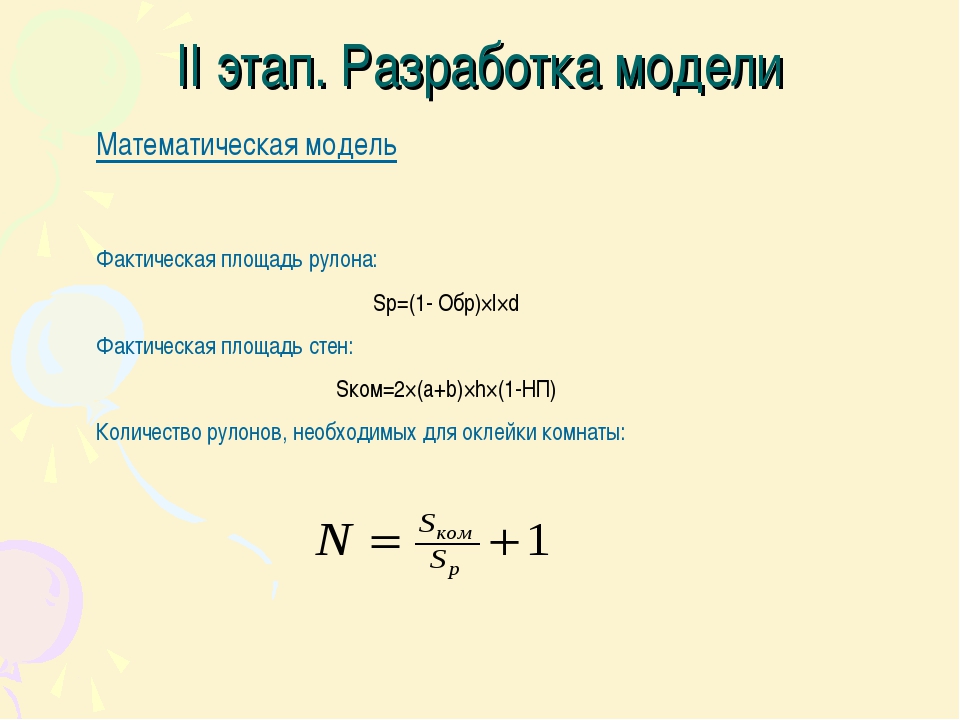
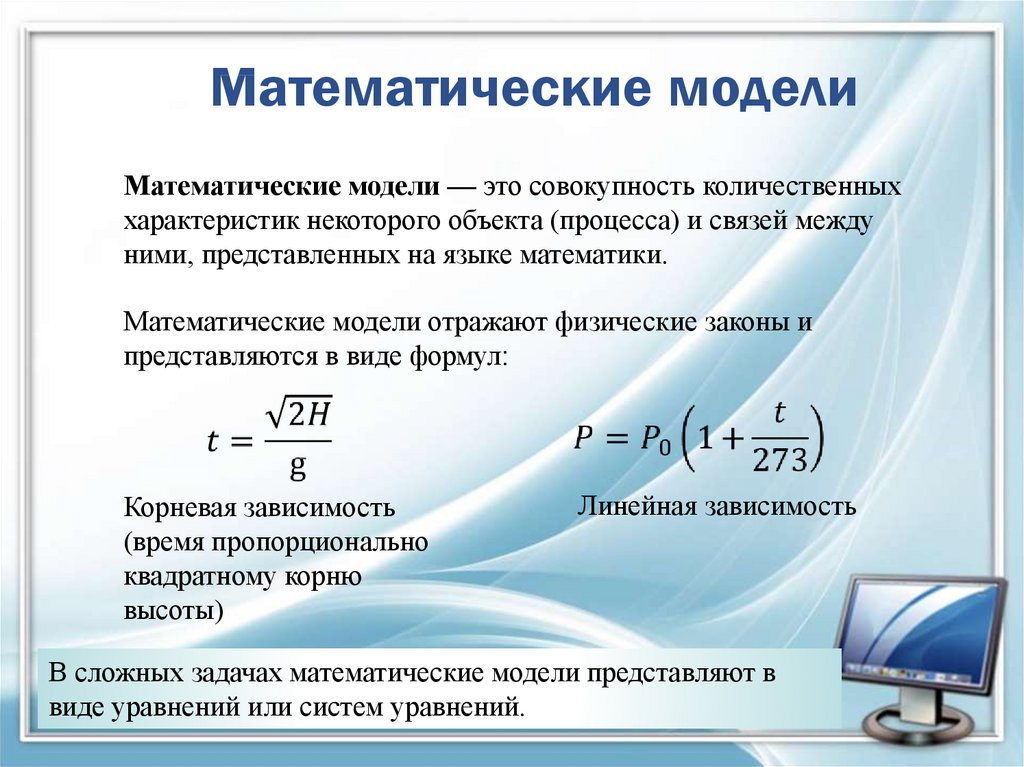
Понятие математической модели.
Математическая модель — очень простое понятие
И очень важное. Именно математические модели связывают математику и реальную жизнь
Говоря простым языком, математическая модель — это математическое описание любой ситуации. И всё. Модель может быть примитивной, может быть и суперсложной. Какая ситуация, такая и модель.)
В любом (я повторяю — в любом!) деле, где нужно чего-нибудь посчитать да рассчитать — мы занимаемся математическим моделированием. Даже если и не подозреваем об этом.)
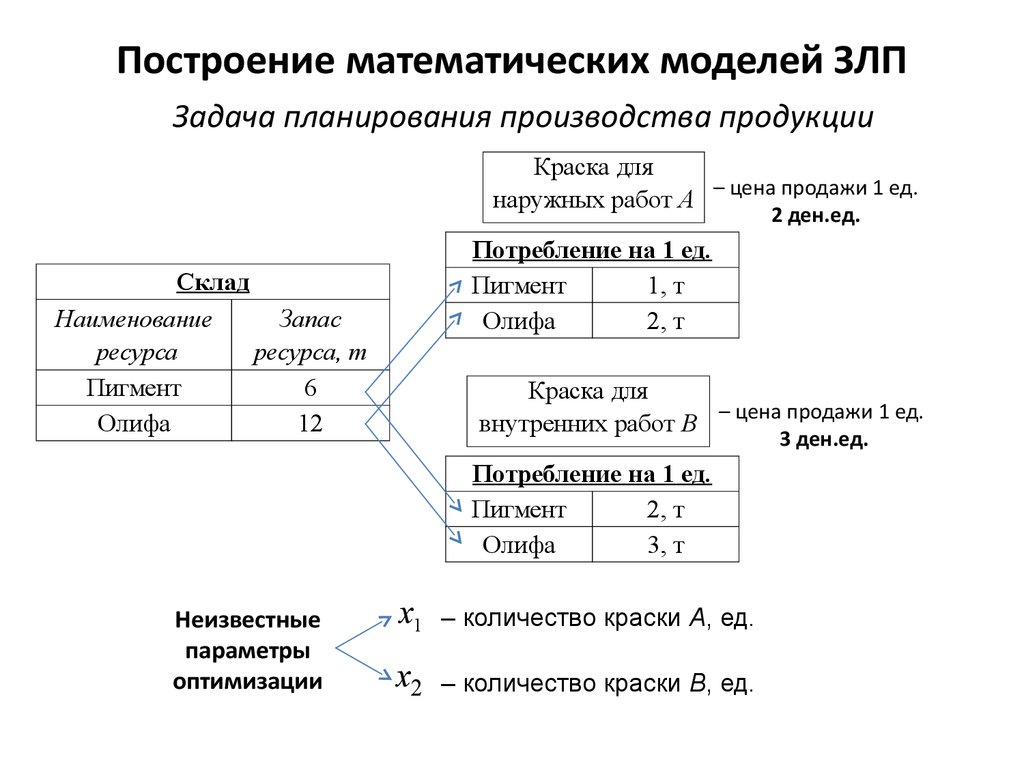
Например, нам нужно посчитать расходы (Р) на покупки в магазине. Надо купить две булки (Б) и три пачки масла (М). Мы знаем цену булки (ЦБ) и цену масла (ЦМ). Легко можно записать:
Р = 2·ЦБ + 3·ЦМ
Вот эта запись и будет математической моделью расходов на наши покупки. Модель не учитывает цвет упаковки, срок годности, вежливость кассиров и т.п. На то она и модель, а не реальная покупка. Но расходы, т.е. то, что нам надо — мы узнаем точно. Если модель правильная, конечно.



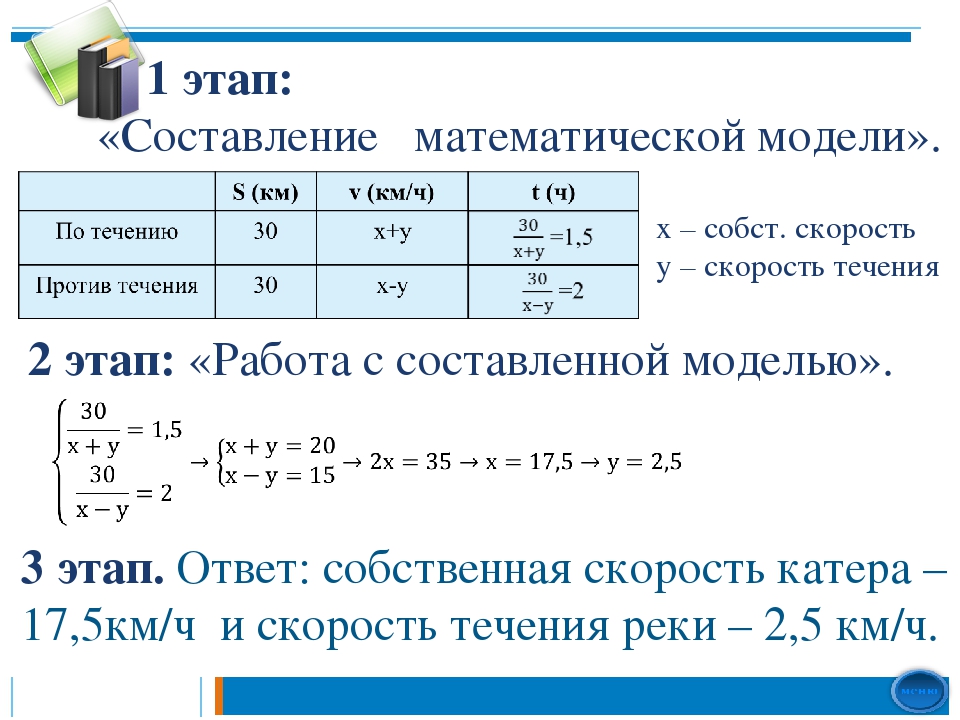
Представлять, что такое математическая модель полезно, но этого мало. Самое главное — уметь эти модели строить.