Современное состояние и перспективы
Исследования атмосферы
Исследования атмосферы стационарными лидарами является наиболее массовой отраслью применения технологии. В мире развёрнуто несколько постоянно действующих исследовательских сетей (межгосударственных и университетских), наблюдающих за атмосферными явлениями.
Раннее оповещение о лесных пожарах
Лидар, размещённый на возвышенности (на холме или на мачте) и сканирующий горизонт, способен различать аномалии в воздухе,
порождённые очагами пожаров. В отличие от пассивных инфракрасных систем, распознающих только тепловые аномалии, лидар
выявляет дымы по аномалиям, порождаемым частицами горения, изменению химического состава и прозрачности воздуха и т. п.
Исследования Земли
Вместо установки лидара на земле, где принимаемый отражённый свет будет зашумлён из-за рассеяния в загрязнённых, нижних слоях атмосферы, «атмосферный» лидар может быть поднят в воздух или на орбиту, что существенно улучшает соотношение сигнал-шум и эффективный радиус действия системы.
Строительство и горное дело
Лидары, сканирующие неподвижные объекты (здания, городской ландшафт, открытые горные выработки), относительно дёшевы: так как объект неподвижен, то особого быстродействия от системы обработки сигнала не требуется, а сам цикл обмера может занимать достаточно долгое время (минуты).
Морские технологии
Измерение глубины моря. Для этой задачи используется дифференциальный лидар авиационного базирования. Красные волны почти
отражаются поверхностью моря, тогда как зелёные частично проникают в воду, рассеиваются в ней, и отражаются от морского дна. Технология пока не применяется в гражданской гидрографии из-за высокой погрешности измерений и малого диапазона измеряемых глубин.
Поиск рыбы. Аналогичными средствами можно обнаруживать признаки косяков рыбы в приповерхностных слоях воды. Специалисты американской государственной лаборатории ESRL утверждают, что поиск рыбы лёгкими самолётами, оборудованных лидарами, как минимум на порядок дешевле, чем с судов, оборудованных эхолотами.
Спасение людей на море. В 1999 ВМС США запатентовали конструкцию авиационного лидара, применимого для поиска людей и человеческих тел на поверхности моря; принципиальная новизна этой разработки — в применении оптического маскирования отражённого сигнала, снижающего влияние помех.
Разминирование. Обнаружение мин возможно с помощью лидаров, непосредственно погруженных в воду (например, с буя, буксируемого катером или вертолётом), однако не имеет особых преимуществ по сравнению с активными акустическими системами (сонарами).
На транспорте
Определение скорости транспортных средств. В Австралии простейшие лидары используются для определения скорости автомобилей — так же, как и полицейские радары. Оптический «радар» существенно компактнее традиционного, однако менее надёжен в определении скорости современных легковых автомобилей: отражения от наклонных плоскостей сложной формы «запутывают» лидар.
Беспилотные транспортные средства. В 1987—1995 годах в ходе проекта EUREKA Prometheus, стоившего Европейскому союзу более 1 млрд долларов, были выработаны первые практические разработки беспилотных автомобилей. Наиболее известный прототип, VaMP (разработчик — Университет бундесвера в Мюнхене) не использовал лидары из-за недостатка вычислительной мощности тогдашних процессоров. Новейшая их разработка, MuCAR-3 (2006), использует единственный лидар кругового обзора, поднятый высоко над крышей машины, наравне с направленной мультифокальной камерой обзора вперёд и инерциальной навигационной системой.
Промышленные и сервисные роботы. Системы машинного зрения ближнего радиуса действия для роботов, основанные на сканирующем лидаре IBM, формируют цилиндрическую развёртку с углом охвата горизонта 360° и вертикальным углом зрения до +30..-30°. Собственно дальномер, установленный внутри сканирующей оптической головки, работает на постоянном излучении малой мощности, модулированном несущей частотой порядка 10 МГц. Расстояние до целей (при несущей 10 МГц — не более 15 м) пропорционально сдвигу фаз между опорным генератором, модулирующим источник света, и ответным сигналом.
Q&A
Всё ещё не понятно? – пиши вопросы на ящик
Как работает лидар
Лидар — активный дальномер оптического диапазона, который формирует трёхмерную картину окружающего пространства. Работает по принципу эхолота. На открытых пространствах в качестве излучателя используется лазер, в закрытых помещениях достаточно обычного светодиода. Лидары разрабатываются с 1960-х годов.







Обычная цифровая видеокамера делает изображения с более высоким разрешением, но не дает точную информацию о расстоянии до объектов и плохо работает при слабом освещении.
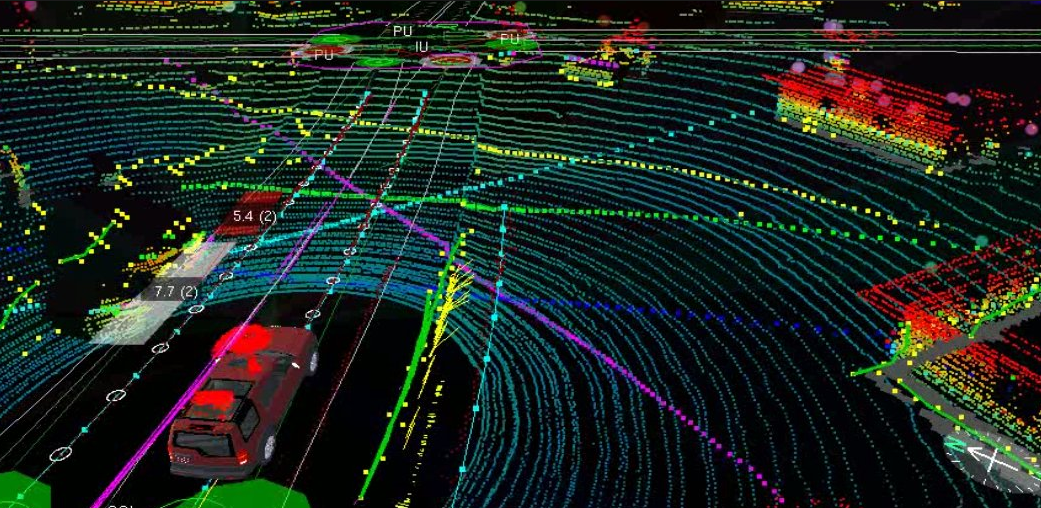
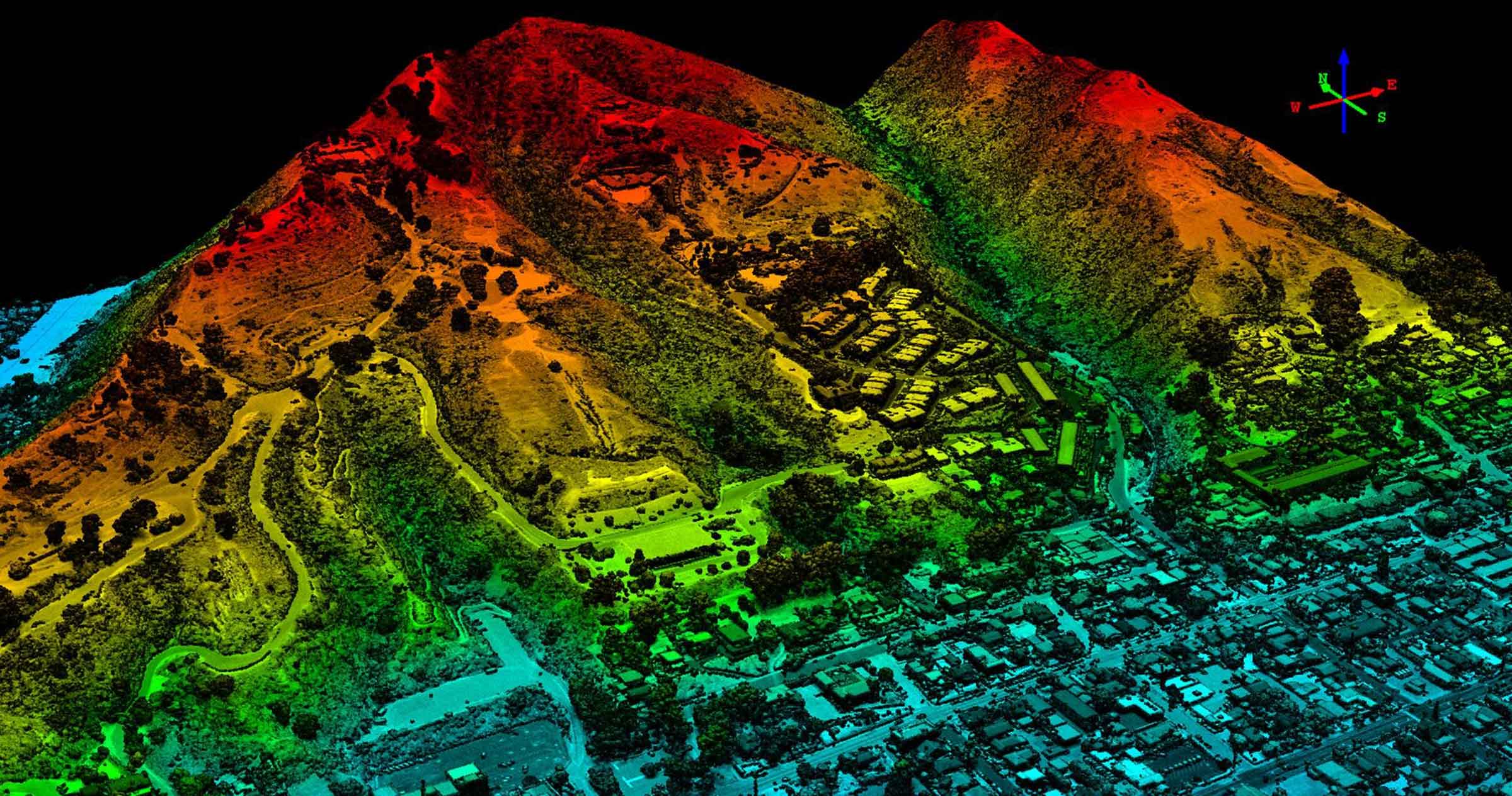
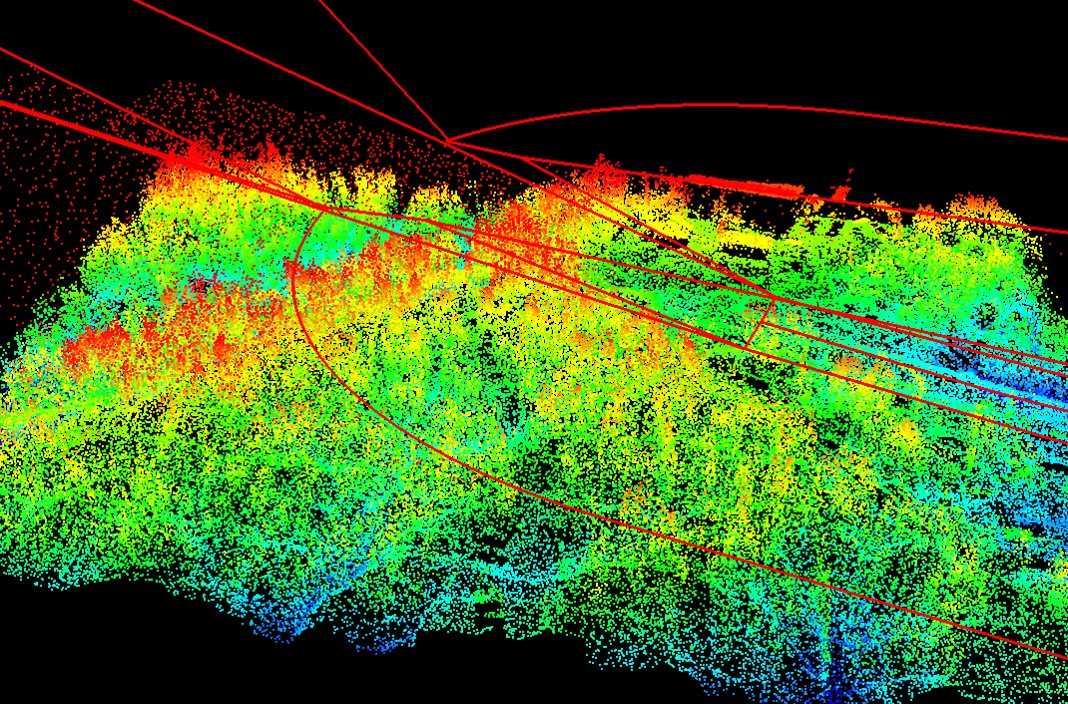
 Данные с лидара — улица в Сан-Франциско
Данные с лидара — улица в Сан-Франциско
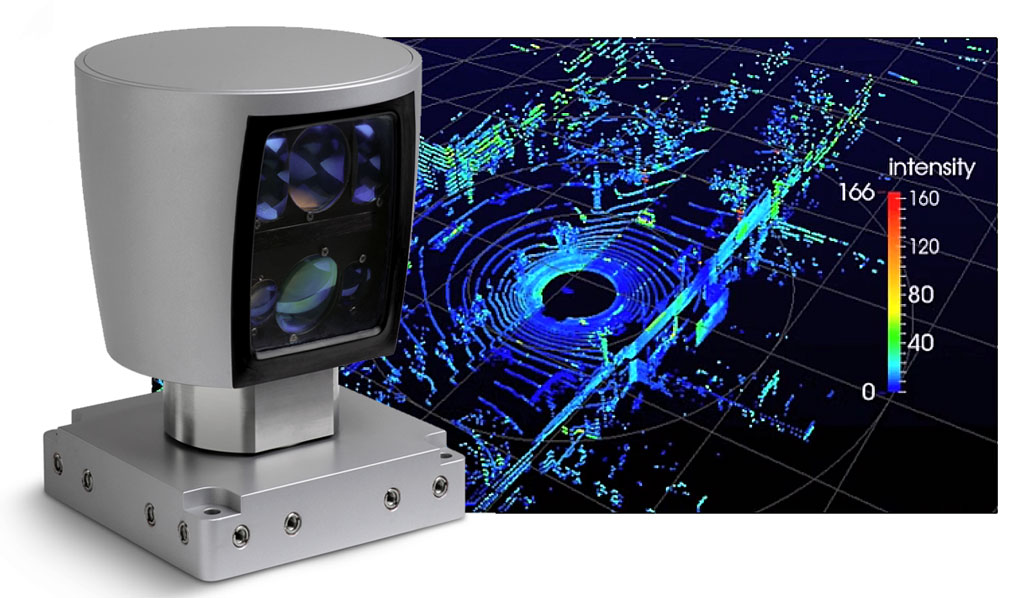
Разработчики Ouster решили взять только лучшее от камер и лидаров, объединив это в одном устройстве. Лидар Ouster OS-1 выдает изображения с фиксированной разрешающей способностью. Слои данных пространственно коррелированы, без временных несоответствий или шаттер эффектов, имеют 16 бит на пиксель и линейную фотоотраженность.
Одновременные уровни изображения в реальном времени выводятся из OS-1. То, что вы видите сверху донизу, это данные окружающего мира, интенсивности, дальности и облака точек — ВСЕ от лидара
Обратите внимание, что окружающее изображение захватывает облачное небо и тени от деревьев и транспортных средств
Оптическая система OS-1 имеет большую диафрагму, чем большинство DSLR, а разработанный метод подсчета фотонов ASIC настроен на повышенную чувствительность, поэтому окружающие изображения получаются детальными даже в условиях низкой освещенности. OS-1 фиксирует как прямые сигналы, так и скрытые данные (ambient data) в ближнем инфракрасном диапазоне, поэтому данные напоминают видимые освещенные изображения тех же сцен. Поэтому есть вероятность, что алгоритмы, разработанные для камер, хорошо будут работать с данными из лидара.
Open source визуализатор
Также разработчики обновляют open-source драйвер для лидара OS-1, чтобы он выдавал слои данных в фиксированном разрешении с панорамным обзором в 360. Помимо этого создатели представляют новый, встроенный в VTK, кросс-платформенный инструмент для визуализации, для просмотра, записи и воспроизведения, как изображений, так и облаков точек. Выходные данные сенсора не требуют пост-процессинга, чтобы показывать заявленную функциональность, все происходит в аппаратной части, а драйвер просто собирает потоки пакетов данных в изображения.
Новый open-source визуализатор
Примечания
- Middleton, W. E. K, and Spilhaus, A. F., Meteorological instruments, University of Toronto, 3rd ed. 1953
- ↑ (недоступная ссылка). Дата обращения 27 декабря 2007.
- Marcus, I. R., Rangemeter for XM23 Rangefinder, U. S. DoD report of 17/02/1964,
- См., например, Deitz, Paul H., Atmospheric Effects on the Beam Propagation of the XM-23 Laser Rangefinder, Laser Range Instrumentation, SPIE Proceedings Vol. 11. Bellingham, WA: Society for Photo-Optical Instrumentation Engineers, 1967., p.35
- R. T. H. Collis, Lidar: A new atmospheric probe, Quarterly Journal of the Royal Meteorological Society, Volume 92, Issue 392, Pages 220—230, 1966
- Практическая и теоретическая сторона разработок 1980-х годов зафиксирована в: Jean Rueger. Electronic Distance Measurement: An Introduction, Springer, 1990, 4th edition 1996, ISBN 978-3-540-61159-2
- Басов Н. Г., Кокурин Ю. Л. Лазерная локация Луны // Наука и человечество, 1986. — М.: Знание, 1986. — С. 262—277.
- Георгиев Н. И., Нойберт Р., Татевян С. К., Хайретдинов К. А. Лазерные спутниковые дальномеры // Наука и человечество, 1989. — М.: Знание, 1989. — С. 314—327.
- Таисия Филиппова. . nplus1.ru. Дата обращения 22 января 2019.
- (недоступная ссылка). Дата обращения 3 мая 2013.
- . www.lsystems.ru. Дата обращения 20 августа 2018.
- Laser Doppler Velocimetry Applied to the Measurement of Local and Global Wind, J. M Vaughan and P. A. Forrester, Wind Engineering, Vol. 13 No. 1 1989
- Захаров В. М. Метеорологическая лазерная локация / В. М. Захаров, О. К. Костко. — Ленинград: Гидрометеоиздат, 1977. — 222 с.
- ↑ Зуев В. Е. Дистанционное оптическое зондирование атмосферы / В. Е. Зуев, В. В. Зуев. — СПб.: Гидрометеоиздат, 1992. — 232 с.
- Кащеев Б. Л. Дистанционные методы и средства исследования процессов в атмосфере Земли / Под общ. ред. Б. Л. Кащеева, Е. Г. Прошкина, М. Ф. Лагутина. — Харьков: Харьк. нац. ун-т радиоэлектроники; Бизнес Информ, 2002. — 426 с.
- Lidar measurements taken with a large-aperture liquid mirror. 2. Sodium resonance-fluorescence system / P.S. Argall, O. N. Vassiliev, R. J. Sica, and et al// Applied Optics. — 2000. — Vol. 39, No. 15. — P. 2393—2400.
- ↑ Лазерный контроль атмосферы / Под ред. Э. Д. Хинкли. — М.: Мир, 1979. — 416 с.
- Behrendt A. Combined temperature lidar for measurements in the troposphere, stratosphere, and mesosphere / A. Behrendt, T. Nakamura, T. Tsuda // Applied optics. — 2004. — Vol. 43, No 14. — P. 2930—2939.
- Lidar: range-resolved optical remote sensing of the atmosphere series, Springer series in optical sciences, vol. 102 / C. Weitkamp (Ed.). — New York: Springer, 2005. — 460 p.
- Behrendt A. Combined Raman lidar for the measurement of atmospheric temperature, water vapor, particle extinction coefficient, and particle backscatter coefficient // Applied Optics. — 2002. — Vol. 41, No 36. — P. 7657 — 7666.
- ADM-Aeolus
- (недоступная ссылка). Дата обращения 30 декабря 2007.
- (недоступная ссылка). Дата обращения 10 марта 2006.
- ↑
- (недоступная ссылка). Дата обращения 30 декабря 2007.
Когерентное и некогерентное обнаружение сигналов
Во всех случаях радиотехническая система обнаруживает сигналы на фоне помех. Считается, что полезный сигнал имеет
частоту, равную резонансной частоте настройки системы ωc= ω. Начальная фаза равна нулю:
uct=Ucmsinωt
Сумма сигнала и помехи:
uспt=uсt+uпt=Ucm+Uп1sinωt+Uп2cosωt
где Uп1 и Uп2 – амплитуды помех.
-
Некогерентное детектирование (прямой метод измерения): Реагирование происходит на амплитуду суммарного колебания и
помехи Uспm .Превышением сигнала над помехой называется следующее отношение:
mнкг2=Ucm2Uп12+Uп22=Ucm22σ2
где σ2 – дисперсия каждой из амплитуд помехи Uп1 и Uп2 -
Когерентное детектирование: Полностью исключает ортогональную к сигналу составляющую помех. Оно предусматривает
реагирование лишь на колебание, равное сумме амплитуды сигнала Ucm и синфазной составляющей помехи U п1.
Превышением сигнала над помехой при когерентном обнаружении называется отношениеmнкг2=Ucm2U_п12
, где
U_п12
– дисперсия амплитуды синфазной составляющей. Когерентные системы лучше всего подходят для доплеровских
или фазочувствительных измерений и, как правило, используют оптическое гетеродинное детектирование. Это позволяет им
работать при гораздо меньшей мощности, но при этом конструкция фотоприемной схемы намного сложнее.
Существуют две основные категории импульсных лидаров: микроимпульсные и высокоэнергетические системы.
Микроимпульсные лидары работают на более мощной компьютерной технике с большими вычислительными возможностями
Эти лазеры меньшей мощности и классифицируются как «безопасные для глаз», что позволяет использовать их практически без
особых мер предосторожности.
Лидары с большой энергией импульса в основном применяются для исследования атмосферы, где они часто
используются для измерения различных параметров атмосферы, таких как высота, наслоение и плотность облаков,
свойства частиц облака, температуру, давление, ветер, влажность и концентрацию газов в атмосфере.. В отличие от радиоволн, эффективно отражающихся только от достаточно крупных металлических целей, световые волны подвержены рассеиванию в любых средах, в том числе в воздухе, поэтому возможно не только определять расстояние до непрозрачных (отражающих свет) дискретных целей, но и фиксировать интенсивность рассеивания света в прозрачных средах
Возвращающийся отражённый сигнал проходит через ту же рассеивающую среду, что и луч от источника, подвергается вторичному рассеиванию, поэтому восстановление действительных параметров распределённой оптической среды — достаточно сложная задача, решаемая как аналитическими, так и эвристическими методами.
В отличие от радиоволн, эффективно отражающихся только от достаточно крупных металлических целей, световые волны подвержены рассеиванию в любых средах, в том числе в воздухе, поэтому возможно не только определять расстояние до непрозрачных (отражающих свет) дискретных целей, но и фиксировать интенсивность рассеивания света в прозрачных средах. Возвращающийся отражённый сигнал проходит через ту же рассеивающую среду, что и луч от источника, подвергается вторичному рассеиванию, поэтому восстановление действительных параметров распределённой оптической среды — достаточно сложная задача, решаемая как аналитическими, так и эвристическими методами.








История
Аббревиатура LIDAR впервые появилась в работе Миддлтона и Спилхауса «Метеорологические инструменты» 1953 года, задолго до изобретения лазеров. Первые лидары использовали в качестве источников света обычные или импульсные лампы со скоростными затворами, формировавшими короткий импульс.
США
В 1963 году в США начались полевые испытания носимого лазерного дальномера XM-23 с мощностью излучения 2,5 Вт и диапазоном измеряемых расстояний 200—9995 м.. XM-23 был изначально несекретным образцом и стал базовым прибором для гражданских исследователей 1960-х годов. К концу 1960-х годов лазерные дальномеры стали стандартным оборудованием новых танков США (первым образцом, спроектированным с применением лазерных дальномеров, стал M551 Шеридан, запущенный в серию в 1967). Гражданские применения лазерных дальномеров были ограничены лишь высокой стоимостью интегральных схем того времени.
Тогда же, в первой половине 1960-х годов, начались опыты по применению лидара с лазерными излучателями для исследования атмосферы.
В 1969 году лазерный дальномер и мишень, установленная на Аполлоне-11, применялся для измерения расстояния от Земли до Луны. Четыре мишени, доставленные на Луну тремя «Аполлонами» и «Луноходом-2», и по сей день используются для наблюдения за орбитой Луны.
В течение 1970-х годов, с одной стороны, отлаживалась технология лазерных дальномеров и компактных полупроводниковых лазеров, а с другой — были начаты исследования рассеяния лазерного луча в атмосфере. К началу 1980-х годов эти исследования стали настолько известными в академических кругах США, что аббревиатура LIDAR стала именем нарицательным — lidar, что зафиксировал словарь Уэбстера 1985 года. В те же годы лазерные дальномеры достигли стадии зрелой технологии (по крайней мере, в военных приложениях) и выделились в отдельную от лидаров отрасль техники.
СССР
Эксперименты по лазерной локации Луны в СССР начались в 1963 году, а с 1973 года велись систематические наблюдения всех пяти расположенных к тому времени на Луне уголковых отражателей («Лунохода-1», «Лунохода-2», «Аполлона-11», «Аполлона-14», «Аполлона-15»).
Для лазерной локации искусственных спутников Земли в СССР были запущены спутники с уголковыми отражателями на борту: «Интеркосмос-17» (1977), «Интеркосмос-Болгария-1300» (советско-болгарский, 1981), «Метеор-3» (1985), использовался разработанный советскими учёными лазерный дальномер «Крым».
В СССР существовало два семейства лидарных метеорологических приборов, предназначенных для использования на аэродромах (в обоих семействах в качестве источника зондирующего светового потока использовались импульсные лампы):
- Измерители высоты нижней границы облаков — светолокаторы (в начале 1960-х годов создан прибор ИВО-1, далее в 1970-х годах ИВО-2, РВО-2). Принцип действия светолокатора основан на измерении обратно рассеянного зондирующего импульса в атмосфере.
- Измерители дальности видимости — трансмиссометры (созданный в конце 1960-х годов прибор РДВ-1, в последующие десятилетия ему на смену пришли РДВ-2, РДВ-3, ФИ-1). Принцип действия трансмиссометра (регистратора прозрачности атмосферы) основан на измерении степени ослабления интенсивности световых импульсов после их прохождения через слой атмосферы, ограниченный длиной базисной линии прибора.
Как улучшить портреты на айфоне

Лидар может улучшить портретную съёмку, но зачем, если она на iPhone и так всегда была на высоте?
Портретная съёмка пока выглядит самым вероятным сценарием массового использования лидара. Благодаря тому что он позволяет распознавать трёхмерные объекты, он сможет добиться более естественного и правильного эффекта размытия. Но вот проблема – телеобъективы, которые Apple использовала в iPhone с 2016 года, и так справлялись со своей задачей на 100%. Что-то я не припомню, чтобы кто-то из экспертов негативно отозвался о портретной съёмке даже на iPhone 7 Plus, не говоря уже о более новых моделях. Напротив, флагманские аппараты Apple либо превосходили конкурентов, либо шли с ними вровень, но никак не уступали. Поэтому, в общем, и здесь лидар будет ни к чему.
Аналогичного мнения придерживается и Михаил Королёв, основатель AppleInsider.ru:
Я бы тоже очень хотел ошибиться и в сентябре узнать, что Apple придумала для лидара в iPhone 12 совершенно гениальное применение, а не вот эти притянутые за уши сценарии вроде AR или портретной съёмки. Но, учитывая, что пока никто даже в теории не придумал, как ещё можно использовать этот аппаратный компонент, меня не покидает стойкое ощущение, что Apple действительно свернула куда-то не туда и уделяет время технологии, которая банально не нужна большинству пользователей.
Какая польза от LiDAR в iPad Pro?
В сущности, LiDAR — это датчик улучшенный датчик ToF, который можно увидеть на таких устройствах, как Galaxy Note 10+, Galaxy S20 Ultra и Huawei Mate 30 Pro. Но похоже, что Apple использовала собственный сканер LiDAR, который немного более продвинут, чем система ToF.









Apple утверждает, что новый датчик LiDAR может измерять объект на расстоянии до пяти метров. Напротив, датчик ToF на существующих смартфонах может обнаруживать объекты только на максимальном расстоянии около двух метров. Между тем, Apple утверждает, что ее система LiDAR может работать «на уровне фотонов с нано-секундной скоростью».
Apple считает, что ее сканер LIDAR будет чрезвычайно полезен для приложений дополненной реальности (AR). Для тех из вас, кто не знаком, AR относится к технологии, которая накладывает информацию и виртуальные объекты на реальные сцены в реальном времени. Он использует существующую среду и добавляет информацию для создания новой искусственной среды.
Apple уже довольно давно продвигает использование AR на iPad и iPhone. В настоящее время Apple App Store предлагает множество AR-приложений, многие из которых предназначены для студенческого сообщества.
Тем не менее, для разработчиков датчик LiDAR на iPad Pro полезен для создания будущих приложений. Система использует преимущества «ARKit», инструментария для разработчиков для создания мощных AR-приложений. Мы можем ожидать, что приложение Apple «Measure» и приложения сторонних разработчиков попытаются использовать преимущества сканера LiDAR на новом iPad Pro.
Нет ни слова о том, как датчик LiDAR улучшит фотографию на iPad Pro
Аппаратная часть
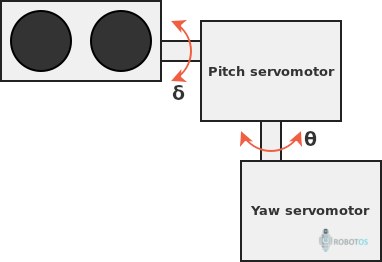
С аппаратной точки зрения сканер довольно прост: два 9-граммовых микромотора контролируют оси вращения поворота и наклона. Корпус, конструкции, напечатан на 3D-принтере.
Что касается электроники, я использовал:
- Arduino Nano : контроллер для турели. Он управляет серводвигателями и управляет лидаром, выполняя небольшое количество вычислений для вывода облака точек.
- LIDAR Lite V3 компактный, высокопроизводительный оптический датчик измерения расстояния Или более дешевый аналог TFmini Работать он будет на более коротком расстоянии (12м)
- Серводвигатели 9g SG90 приводы для поворота лидара. Хотя эти слабые двигатели являются основным слабым местом в системе, я использовал их просто потому, что они у меня уже были. Некоторые более мощные и менее «шаткие» сервоприводы определенно улучшат качество и скорость захвата.
- Конденсатор на 1000 мкФ этот большой электролитический конденсатор предотвращает перезагрузку микроконтроллера во время скачков тока, создаваемых как лидаром, так и двигателями.
Вот схема подключения моей лидарной башни:


А как же сенсор ToF?
Но всё это не означает, что появление LiDAR в телефонах неизбежно. Доступны и другие технологии измерения глубины, к тому же искусственный интеллект продолжает улучшаться и уже сейчас для замера глубины может использовать стандартные датчики камер. Но LiDAR может работать в любых условиях освещения, очень быстро и очень точно, что является одной из причин, по которым Apple делает на него ставку.










В Galaxy S20 Ultra используется сенсор ToF
Сенсор LiDAR отличается от того, что используется во многих флагманах Android. Там популярен датчик времени полета (ToF), который по многим функциям является аналогом LiDAR. ToF также использует отражённый свет для измерения расстояний для портретного режима и AR. Но в ToF использует один импульс света для оценки всего пространства, а LiDAR используется сканер, который с помощью нескольких точек света получает эти показания чаще и с большей точностью.
Таким образом LiDAR является важным и логичным шагом на пути развития камер смартфонов. Их популяризация должна начаться как раз с линейки iPhone 12 Pro, которую покажут осенью.
Устройство
Излучатель
Основная статья: Виды лазеров
Длины волн, излучаемые наиболее распространёнными лазерами. Шкала в микрометрах
В абсолютном большинстве конструкций излучателем служит лазер, формирующий короткие импульсы света высокой мгновенной мощности. Периодичность следования импульсов или модулирующая частота выбираются так, чтобы пауза между двумя последовательными импульсами была не меньше, чем время отклика от обнаружимых целей (которые могут физически находиться дальше, чем расчётный радиус действия прибора). Выбор длины волны зависит от функции лазера и требований к безопасности и скрытности прибора; наиболее часто применяются Nd:YAG-лазеры и длины волн (в нанометрах):
- 1550 нм — инфракрасное излучение, невидимое ни глазу человека, ни типичным приборам ночного видения. Глаз не способен сфокусировать эти волны на поверхности сетчатки, поэтому травматический порог для волны 1550 существенно выше, чем для более коротких волн. Однако риск повреждения глаз на деле выше, чем у излучателей видимого света — так как глаз не реагирует на ИК излучение, то не срабатывает и естественный защитный рефлекс человека
- 1064 нм — ближнее инфракрасное излучение неодимовых и иттербиевых лазеров, невидимое глазу, но обнаружимое приборами ночного видения
- 532 нм — зелёное излучение неодимового лазера, эффективно «пробивающее» массы воды
- 355 нм — ближнее ультрафиолетовое излучение
Также возможно использование (см. ) вместо коротких импульсов непрерывной амплитудной модуляции излучения переменным напряжением.
Сканирующая оптика
Два чёрных цилиндра, вынесенные перед бампером — сканирующие лидары беспилотного автомобиля
Простейшие атмосферные лидарные системы не имеют средств наведения и направлены вертикально в зенит.
Для сканирования горизонта в одной плоскости применяются простые сканирующие головки. В них неподвижные излучатель и приёмник также направлены в зенит; под углом 45° к горизонту и линии излучения установлено зеркало, вращающееся вокруг оси излучения. В авиационных установках, где надо сканировать полосу, перпендикулярную направлению полёта самолёта-носителя, ось излучения — горизонтальна. Для синхронизации мотора, вращающего зеркало, и средств обработки принимаемого сигнала используются точные датчики положения ротора, а также неподвижные реперные риски, наносимые на прозрачный кожух сканирующей головки.
Сканирование в двух плоскостях добавляет к этой схеме механизм, поворачивающий зеркало на фиксированный угол с каждым оборотом головки — так формируется цилиндрическая развёртка окружающего мира. При наличии достаточной вычислительной мощности можно использовать жёстко закреплённое зеркало и пучок расходящихся лучей — в такой конструкции один «кадр» формируется за один оборот головки.
Приём и обработка сигнала
Основная статья: Цифровая обработка сигналов
Важную роль играет динамический диапазон приёмного тракта. Например, приёмный тракт новейшей (2006 год) подсистемы машинного зрения MuCAR-3 с динамическим диапазоном 1:106 обеспечивает эффективный радиус действия от 2 до 120 м (всего 1:60). Чтобы избежать перегрузки приёмника интенсивной засветкой от рассеивания в «ближней зоне», в системах дальнего радиуса действия применяют высокоскоростные механические затворы, физически блокирующие приёмный оптический канал. В устройствах ближнего радиуса со временем отклика менее микросекунды такой возможности нет.