Сравнение с шаговым двигателем
Другим вариантом точного позиционирования приводимых элементов без датчика обратной связи является применение шагового двигателя. В этом случае схема управления отсчитывает необходимое количество импульсов (шагов) от положения репера (этой особенности обязан характерный шум шагового двигателя в дисководах 3,5″ и CD/DVD при попытках повторного чтения). При этом точное позиционирование обеспечивается параметрическими системами с отрицательной обратной связью, которые образуются взаимодействующими между собой соответствующими полюсами статора и ротора шагового двигателя. Сигнал задания для соответствующей параметрической системы формирует система управления шаговым двигателем, активизирующая соответствующий полюс статора.
Так как датчик обычно контролирует приводимый элемент, электрический сервопривод имеет следующие преимущества перед шаговым двигателем:
- не предъявляет особых требований к электродвигателю и редуктору — они могут быть практически любого нужного типа и мощности (а шаговые двигатели, как правило, маломощны и тихоходны);
- гарантирует максимальную точность, автоматически компенсируя:
- механические (люфты в приводе) или электронные сбои привода;
- постепенный износ привода, шаговому же двигателю для этого требуется периодическая юстировка;
- тепловое расширение привода (при работе или сезонное), это было одной из причин перехода на сервопривод для позиционирования головок в жестких дисках;
- обеспечивая немедленное выявление отказа (выхода из строя) привода (по механической части или электронике);
- большая возможная скорость перемещения элемента (у шагового двигателя наименьшая максимальная скорость по сравнению с другими типами электродвигателей);
- затраты энергии пропорциональны сопротивлению элемента (на шаговый двигатель постоянно подаётся номинальное напряжение с запасом по возможной перегрузке);
Недостатки в сравнении с шаговым двигателем
- необходимость в дополнительном элементе — датчике;
- сложнее блок управления и логика его работы (требуется обработка результатов датчика и выбор управляющего воздействия, а в основе контроллера шагового двигателя — просто счётчик);
- проблема фиксирования: обычно решается постоянным притормаживанием перемещаемого элемента либо вала электродвигателя (что ведёт к потерям энергии) либо применение червячных/винтовых передач (усложнение конструкции) (в шаговом двигателе каждый шаг фиксируется самим двигателем).
- сервоприводы, как правило, дороже шаговых.
Сервопривод, однако, возможно использовать и на базе шагового двигателя или в дополнение к нему до некоторой степени совместив их достоинства и устранив конкуренцию между ними (сервопривод осуществляет грубое позиционирование в зону действия соответствующей параметрической системы шагового двигателя, а последняя осуществляет окончательное позиционирование при относительно большом моменте и фиксации положения).
P.S.:
Проблемы фиксирования никакой нет в сервоприводе в отличие от шагового. Высокоточное позиционирование и удержание в заданной позиции обеспечивается работой электрической машины в вентильном режиме, суть которого сводится к её работе в качестве источника силы. В зависимости от рассогласования положения (и других координат электропривода) формируется задание на силу. При этом несомненным преимуществом сервопривода является энергоэффективность: ток подается только в том необходимом для того объеме, чтобы удержать рабочий орган в заданном положении. В противоположность шаговому режиму, когда подается максимальное значение тока, определяющее угловую характеристику машины. Угловая характеристика машины аналогична при малых отклонениях механической пружине, которая пытается «притянуть» рабочий орган в нужную точку. В шаговом приводе чем больше рассогласование положения, тем больше сила при неизменном токе.
Это интересно: УЗМ-51М — принцип работы, назначение и схема подключения
Сервоприводы MG995 и MG996 tower pro

Серво MG995 является второй по популярности моделью сервоприводов, чаще всего подключаемых к проектам Arduino. Это относительно недорогие сервомоторы, обладающие гораздо лучшими характеристиками по сравнению с SG90.
Характеристики MG995
Выходной вал у MG995 поворачивается на 120 градусов (по 60 в каждом направлении), хотя многие продавцы указывают на 180 градусов. Устройство выполняется в пластиковом корпусе.
- Вес 55 г;
- Крутящий момент 8,5 кг х см;
- Скорость 0,2с/60 градусов (при 4,8В);
- Рабочее питание 4,8 – 7,2В;
- Рабочие температуры – от 0С до -55С.
Описание MG995
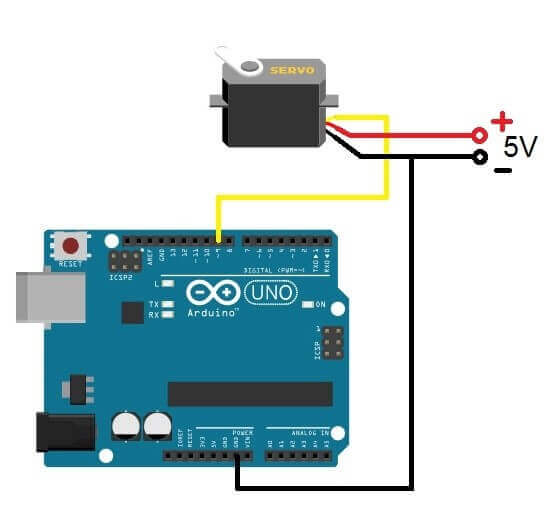
Подключение к ардуино также происходит по трем проводам. В принципе, для любительских проектов допускается подключение MG995 напрямую к Arduino, но ток двигателя всегда будет создавать опасную нагрузку для входов платы, поэтому рекомендуется все-таки запитывать серво отдельно, не забыв соединить землю обоих контуров питания. Другим упрощающим жизнь вариантом будет использование готовых сервоконтроллеров и шилдов, обзор которых мы подготовим в отдельной статье.
MG996R похож на MG995 по своим характеристикам, только он выполняется в металлическом корпусе.
Как работает сервопривод
Вращение выходного вала редуктора, связанного шестернями с сервоприводом, осуществляется путем запуска и остановки электродвигателя. Сам редуктор необходим для регулировки числа оборотов. Выходной вал может быть соединен с механизмами или устройствами, которыми необходимо управлять. Положение вала контролируется с помощью датчика обратной связи, способного преобразовывать угол поворота в электрические сигналы и на котором построен принцип работы всего устройства.
Этот датчик известен также, под названием энкодера или потенциометра. При повороте бегунка, его сопротивление будет изменяться. Изменения сопротивления находится в прямой пропорциональной зависимости с углом поворота энкодера. Данный принцип работы позволяет устанавливать и фиксировать механизмы в определенном положении.
Дополнительно каждый серводвигатель имеет электронную плату, обрабатывающую внешние сигналы, поступающие от потенциометра. Далее выполняется сравнение параметров, по результатам которого производится запуск или остановка электродвигателя. Следовательно, с помощью электронной платы поддерживается отрицательная обратная связь.
Подключить серводвигатель можно с помощью трех проводников. По двум из них подается питание к электродвигателю, а третий служит для прохождения сигналов управления, приводящих вал в определенное положение.
Предотвратить чрезмерные динамические нагрузки на электродвигатель возможно с помощью плавного разгона или такого же плавного торможения. Для этого применяются более сложные микроконтроллеры, обеспечивающие более точный контроль и управление позицией рабочего элемента. В качестве примера можно привести жесткий диск компьютера, в котором головки устанавливаются в нужную позицию с помощью точного привода.







Скетч для сервопривода Ардуино
Скетч ниже заставит сервопривод переместиться в позицию 0 градусов, подождать 1 секунду, затем повернуться на 90 градусов, подождать еще одну секунду, после повернуться на 180 градусов и перейти в первоначальное положение.
Также дополнительно мы используем библиотеку servo — скачайте ниже или в нашем разделе Библиотеки.
Содержимое zip-файла размещается в папку arduino-xxxx/hardware/liraries.
Скетч № 1
// Подклоючаем библиотеку Servo
#include <Servo.h>
// Пин для сервопривода
int servoPin = 3;
// Создаем объект
Servo Servo1;
void setup() {
// Нам нужно подключить сервопривод к используемому номеру пина
Servo1.attach(servoPin);
}
void loop(){
// 0 градусов
Servo1.write(0);
delay(1000);
// 90 градусов
Servo1.write(90);
delay(1000);
// 180 градусов
Servo1.write(180);
delay(1000);
}
Если сервомотор подключен к другому цифровому контакту, просто измените значение servoPin на значение используемого цифрового вывода.
Помните! Использование библиотеки Servo автоматически отключает функцию PWM для PWM-контактов 9 и 10 на Arduino UNO и аналогичных платах.
Наш код просто объявляет объект и затем инициализирует сервопривод с помощью функции servo.attach(). Мы не должны забывать подключать серво библиотеку. В цикле мы устанавливаем сервопривод на 0 градусов, ждем, а затем устанавливаем его на 90, а затем на 180 градусов.
Скетч № 2
Второй скетч для варианта с Arduino Diecimilia ниже.
Нам достаточно будет скачать и подключить библиотеку из архива:
Сам код такой:
#include <Servo.h>
Servo servo1; Servo servo2;
void setup() {
pinMode(1,OUTPUT);
servo1.attach(14); //analog pin 0
//servo1.setMaximumPulse(2000);
//servo1.setMinimumPulse(700);
servo2.attach(15); //analog pin 1
Serial.begin(19200);
Serial.println("Ready");
}
void loop() {
static int v = 0;
if ( Serial.available()) {
char ch = Serial.read();
switch(ch) {
case '0'...'9':
v = v * 10 + ch - '0';
break;
case 's':
servo1.write(v);
v = 0;
break;
case 'w':
servo2.write(v);
v = 0;
break;
case 'd':
servo2.detach();
break;
case 'a':
servo2.attach(15);
break;
}
}
Servo::refresh();
}
Интегрированный Сервопривод
Главной отличительной чертой, а так же подавляющим преимуществом, интегрированного cервопривода является заключение двигателя, контроллера, датчика обратной связи и преобразователя частоты в едином корпусе. Что сводит к минимуму монтажные операции, упрощает подключение и настройку, сокращает время на отладочные работы, значительно экономит место, а так же положительно сказывается на стоимости cервопривода.
На российском рынке уже успели себя отлично себя проявить и зарекомендовать отечественные интегрированные шаговые cервоприводы СПШ.
СПШ – это высокопроизводительный cервопривод на основе шагового двигателя с векторным управлением по скорости и моменту. Данный cервопривод представляет собой уникальную разработку специалистов компании «Сервотехника» и предназначен для максимально широкого применения в машиностроении и других отраслях.
Конструктивно cервопривод СПШ можно разделить на следующие основные блоки:
гибридный шаговый двигатель с габаритами NEMA 23 и 34
преобразователь частоты на основе высокопроизводительного DSP процессора
блок управления (сервоконтроллер и программируемый логический контроллер в одном корпусе)
датчик позиции вала мотора
бесшаговое (векторное) управление на основе адаптированного для шаговых двигателей алгоритма
высокие динамические показатели за счет использования замкнутых контуров регулирования токов в обмотках двигателя
использование замкнутых контуров скорости
низкая вибрация за счет динамически регулируемого усилия
продуманная конструкция и простой монтаж
компактные размеры и небольшая масса
Режимы работы cервопривода СПШ
Динамический – управляющий сигнал от контроллера верхнего уровня передается через цифровой интерфейс в режиме реального времени. Динамический режим используется в системах, требующих контурного управления (например, в манипуляторах со сложной кинематикой и координатных столах для точного позиционирования).









Аналоговый – управление по скорости сигналом ±10 В. Данный режим позволяет использовать привод для модернизации оборудования с аналоговыми системами управления или для управления вручную (например, с помощью штурвала).
Циклический – выполнение запрограммированных контроллером верхнего уровня и сохраненных в памяти привода циклических операций. В ряде случаев это позволяет исключить внешний контроллер верхнего уровня или СЧПУ. Циклический режим используется, например, на конвейерах и в несложных сборочных операциях.
Сетевой – данный режим позволяет пользователю строить распределённые сервосистемы на основе цифрового интерфейса CAN, реализовывать синхронное или последовательное перемещение нескольких осей. В этом случае также возможно использование режима «master-slave», в котором ведомый привод работает в режиме повторителя положения вала ведущего.
Сервопривод СПШ поддерживает и интерфейс Step/Dir, с помощью которого задается текущее положение вала двигателя.
Информация размещенная на сайте носит исключительно информационно-справочный характер и ни при каких условиях не является публичной офертой.
Принцип работы цифровой конструкции
Цифровыми устройствами используется специальный процессор, функционирующий на высоких частотах. Он обрабатывает сигнал приемника и посылает импульсы управления в двигатель с показателем частоты в 300 раз в секунду. Так как показатель частоты значительно выше, то и реакция заметно быстрее и держит позицию лучше. Это вызывает оптимальное центрирование и высокий уровень кручения. Но такой метод требует больших затрат энергии, поэтому батарея, используемая в аналоговом механизме, в этой конструкции будет разряжаться намного быстрее.
Однако все пользователи, которые хоть однажды столкнулись с цифровой моделью, говорят о том, что ее различие с аналоговой конструкцией настолько значительно, что они никогда бы больше не употребляли последнюю.
Альтернативный способ выбора между шаговым и серводвигателем
Некоторые производители при выборе предлагают отталкиваться от мощности двигателей, требуемых для станка (см. статью Выбор шагового двигателя и мощности сервопривода). Для этого предлагается рассчитать коэффициент К по эмпирической формуле К = М * S / 58000, где М — масса движимой части (портала со шпинделем), S — требуемая скорость перемещения (мм/мин). Если К < 1, вам скорее всего подойдут шаговые двигатели. Если К > 2, ваш выбор серводвигатели. Если К лежит в пределах от 1 до 2, Вам могут подойти оба вида привода и Вам стоит ввести дополнительные критерии выбора для определения лучшего варианта.
См. также:
Описание
Сервоприводом является любой тип механического привода (устройства, рабочего органа), имеющий в составе датчик (положения, скорости, усилия и т. п.) и блок управления приводом (электронную схему или механическую систему тяг), автоматически поддерживающий необходимые параметры на датчике (и, соответственно, на устройстве) согласно заданному внешнему значению (положению ручки управления или численному значению от других систем).
Проще говоря, сервопривод является «автоматическим точным исполнителем» — получая на вход значение управляющего параметра (в режиме реального времени), он «своими силами» (основываясь на показаниях датчика) стремится создать и поддерживать это значение на выходе исполнительного элемента.
К сервоприводам, как к категории приводов, относится множество различных регуляторов и усилителей с отрицательной обратной связью, например, гидро-, электро-, пневмоусилители ручного привода управляющих элементов (в частности, рулевое управление и тормозная система на тракторах и автомобилях), однако термин «сервопривод» чаще всего (и в данной статье) используется для обозначения электрического привода с обратной связью по положению, применяемого в автоматических системах для привода управляющих элементов и рабочих органов.
Сервоприводы в настоящее время применяются в высокопроизводительном оборудовании следующих отраслей: машиностроение; автоматические линии производства: напитков, упаковки, стройматериалов, электроники и т. д., подъемно-транспортная техника; полиграфия; деревообработка, пищевая промышленность.[источник не указан 404 дня]
Сервопривод
Сервопривод, как мы уже сказали ранее — это обычный мотор с дополнительно установленным датчиком контроля, выполняющим функцию обратной связи.
При работе мотор будет удерживаться в заданном положении с помощью контроллера. Такой принцип взаимосвязи позволяет добиться высокой скорости и точности оборудования вплоть до одного микрона.
Если на обычный электродвигатель подать напряжение, он будет вращаться.
Чтобы зафиксировать движение в одном положении и при этом не заставить его двигаться в обратном, контроллер должен постоянно переключать ток двигателя на противоположенный, пока не поступит следующая команда.
При таком подходе пропуск шагов исключен, так как энкодер постоянно отслеживает отклонения вала и корректирует ошибку, меняя каждый раз направление движения двигателя.
Недостатки сервоприводов:
- дорогостоящий ремонт;
- высокая стоимость.
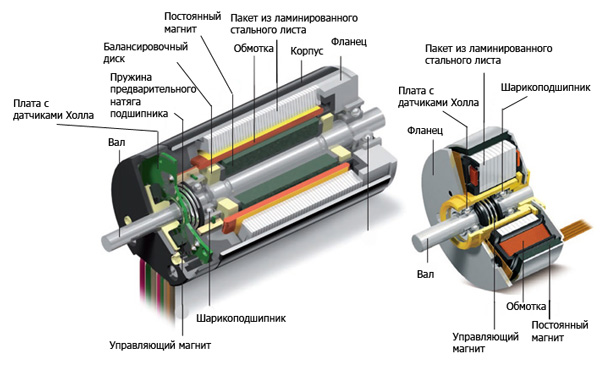
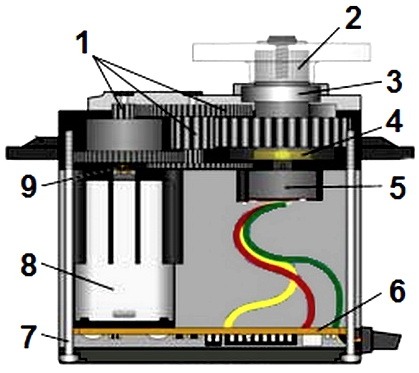
Устройство
 Рисунок 2. Устройство сервопривода
Рисунок 2. Устройство сервопривода
Сервопривод включает в свой состав такие элементы как:
- Приводной механизм – к примеру, это может быть электромотор. Благодаря ему становится возможным управление скоростью нужного диапазона в определённый временной момент;
- Датчики – осуществляют контроль над необходимыми параметрами. Могут быть предназначены для отслеживания положения, усилия, поворота угла или скорости вращения объекта;
- Блок управления – немало важный элемент, так как именно благодаря ему происходит поддержание требуемых параметров в автоматическом режиме;
- Блок питания – питает данный механизм.
Интересно, что самый простой управляющий блок чаще всего создаётся с использованием схемы сравнений значений на датчике и необходимых значений при подаче напряжения определённой полярности на привод.
Виды сервопривода
Сервоприводы подразделяют на электромеханические. В них механизм состоит из электродвигателя и редуктора. Отличаются относительно невысоким быстродействием.









Различают по типу примененного двигателя:
- синхронные, имеют высокую точность вращения выходного вала, быстро набираю обороты;
- асинхронные, отличаются стабильным вращением вала;
- с коллекторным двигателем постоянного или переменного тока (универсальным).
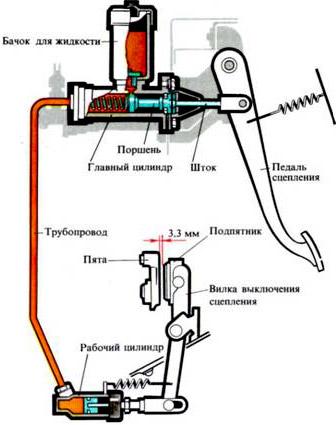
Сервоприводы, где движущим механизмом является поршень с цилиндром, имеют высокое быстродействие. Применяется в автомобиле для переключения скоростей в АКПП. Монтируется в роботах, перемещающих грузы более ста килограмм. В промышленных установках, для переключения заслонок в упаковочных автоматах, где в качестве энергоносителя применяют сжатый воздух.
Основные характеристики сервопривода:
- Основным параметром является крутящий момент или усилие на валу. В паспортных данных указываются две величины, относительно разного напряжения питания.
- Быстродействие, показывает, за какой промежуток времени произойдет поворот выходного вала на 60. Указываются значения для разной величины напряжений.
- Какой используется управляющий сигнал, аналоговый или цифровой.
- Питающее напряжение. Большинство небольших приводов питается напряжением от 4,8 до 7,2 Вольт. Применяется, например, в радиоуправляемых моделях. Комплектуется тремя проводами и имеет стандартную распиновку. На белый, коричневый или желтый подается сигнал управления, на красный напряжение питания, а черный – общий провод.
- Рабочий угол поворота, обычно он составляет 180 или 360. Выпускаются модернизированные приводы с постоянным вращением вала;
- Материал изготовления шестеренок редуктора. Они изготавливаются из латуни, карбона, пластика или могут быть комбинированные.
В электромеханическом сервоприводе применяются электродвигатели с сердечником, при работе которых возникает вибрация, когда происходит вращение маятника. Это уменьшает точность поворота выходного вала. Лишены этого недостатка моторы с минимальной кинетической энергией ротора. Такие привода необходимы для ЧПУ станка, чтобы точно установить исполнительный механизм. Однако, они дороже двигателей с сердечником.
Самым распространенным редуктором является шестеренчатый, который предназначен для понижения частоты вращения и увеличения момента на выходном валу. Реже применяют привод с червячным редуктором, который имеет большое передаточное число, но дороже и сложнее в производстве.
Преимущества прямых приводов
Развитие промышленного машиностроения и роботехники не стоит на месте, поэтому с каждым днем требования к точности и производительности устройств возрастают. Мы все чаще сталкиваемся с задачами, где точность измеряется уже в угловых секундах. С этим современные сервоприводы справляются. Но также необходимо помнить об особенностях передаточных механизмов, таких как редуктор, ремень/шкив или кулачковый механизм. Любой, даже самый прецизионный редуктор имеет люфт, у ременчатой передачи и кулачковых механизмов тоже есть погрешности, не говоря о том, что они увеличивают размеры привода, что в некоторых применениях особенно критично. В связи с этим стоит задуматься о более высокоточной технологии передачи движения — технологии прямого (безредукторного) привода (рис. 3), которую мы рассмотрим на примере продукции Kollmorgen.
Само понятие «прямой привод» означает, что исполнительный орган непосредственно подключен к приводящему его в движение электродвигателю, т. е. не имеет передаточных элементов. Это относится как к вращательному, так и к линейному передвижению. Точность прямого привода можно оценить на следующем примере. Серводвигатель с прецизионным редуктором имеет люфт в одну угловую минуту: это означает, что при полностью неподвижном приводе может произойти смещение исполнительного органа на такую величину. В то же время повторяемость серводвигателя со сквозным валом Kollmorgen DDR составляет более одной угловой секунды. Таким образом, получается, что у серводвигателей с прямым приводом точность позиционирования в 60 раз выше, чем у мотора-редуктора.
Используя прямой привод, можно улучшить качество изготавливаемой продукции за счет следующих особенностей:
- более точная печать;
- раскрой и длина протяжки становятся точнее;
- более точная координация с другими осями машины;
- высокая точность при позиционировании;
- исключаются проблемы при настройке компенсации люфта.
Прямым приводам Kollmorgen свойственны и другие преимущества. Например, компоненты механической передачи накладывают ограничения на то, как быстро мы можем произвести запуск и останов исполнительного механизма. Из-за этих факторов понижается возможная пропускная способность машины, что напрямую влияет на ее производительность.
Прямой привод устраняет эти ограничения, позволяет значительно ускорить цикл «запуск/останов» и уменьшить время простоев. При этом пропускная способность оборудования может повыситься в два раза.
Следующим преимуществом является повышение надежности машины из-за исключения дополнительных элементов и механических передач. При использовании прямого привода не нужно периодически обслуживать ремни и шкивы, заниматься их протягиванием, менять смазочные материалы в редукторе. Необходимы только серводвигатель со сквозным валом и крепежные болты. Таким образом, исключаются многие детали, такие как: кронштейны, ограждения, ремни, шкивы, натяжители, муфты и др. В результате это позволяет:
- уменьшить количество деталей в спецификации;
- упростить сборку и сэкономить время на монтаж;
- снизить затраты (за счет того, что не требуется докупать лишние детали и их устанавливать).
Наконец, еще одним преимуществом прямых приводов можно считать уменьшение шума. К примеру, прямые приводы Kollmorgen имеют уровень шума всего лишь 20 дБ, что превосходит показатели сервосистем с механическими передачами.
Управление
Для того чтобы серводвигатель мог функционировать в нём используют специальную систему, основанную на G-кодах. Упомянутые коды представлены набором управляющих команд, которые заложены в программе.
Например, в системе ЧПУ сервопривод контактирует с инверторами, способными изменять напряжение, которое соответствует входному, в обмотке электромотора.
Вся система серводвигателя управляется/контролируется блоком управления, из которого поступают различные команды, например, передвижения по оси Х или У. После подачи команды в инверторе создаётся определённое напряжение, питающее привод. Затем серводвигатель начинает своё круговое движение, связанное с главным исполнительным элементом механизма и энкодером.
Энкодер создаёт множество импульсов, которые подсчитываются блоком, осуществляемыми управление устройством. Для каждой позиции исполнительного элемента в программе установлено определённое количество импульсов. Так под их влиянием либо подаётся напряжение на моторчик, либо прекращается.
Характеристика препарата, его действие, особенности применения
Плюсы и минусы сервомоторов
Благодаря унифицированным размерам, эти устройства легко и просто устанавливаются в любые конструкции. Они безотказны и надежны, каждый из них работает практически бесшумно, что имеет большое значение при их эксплуатации на сложных и ответственных участках. Даже на невысоких скоростях можно добиться точности и плавных перемещений. Каждый сервопривод может быть настроен персоналом, в зависимости решения тех или иных задач.
В качестве недостатков отмечаются определенные сложности при настройках и сравнительно высокая стоимость.

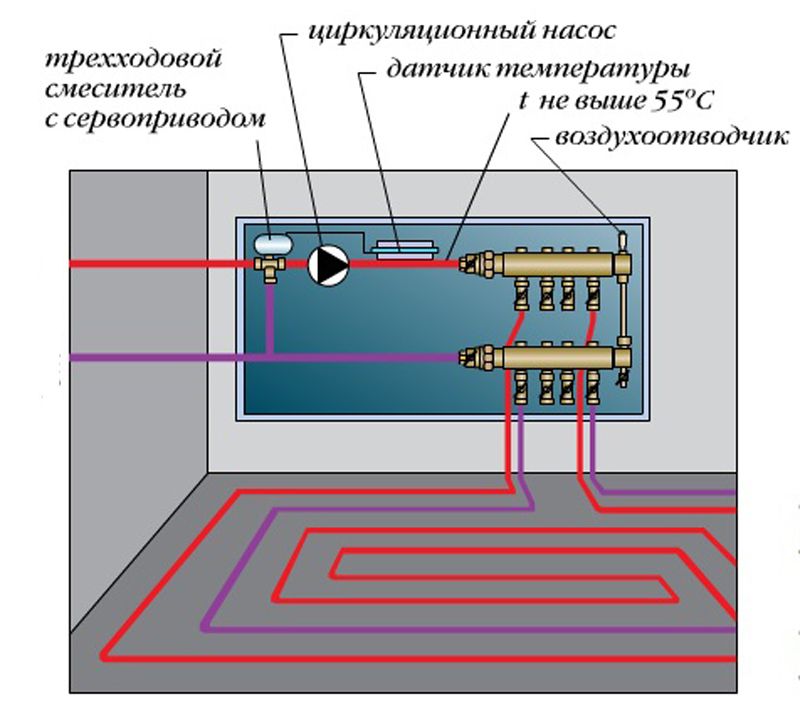
Сервопривод для теплого пола

Управление шаговым двигателем

ЩСУ – щит станций управления

Ремонт люстры с пультом управления

Шаговый двигатель. Принцип работы

Принцип работы частотного преобразователя для асинхронного двигателя
Что такое сервопривод
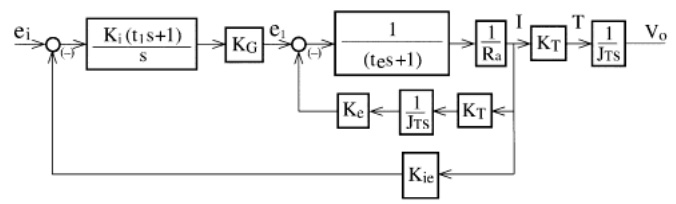
Сервопривод – это система привода, которая в широком диапазоне регулирования скорости обеспечивает динамичные, высокоточные процессы и обеспечивает хорошую их повторяемость. Это система, предназначенная для отработки момента, скорости и позиции с заданной точностью и динамикой. Классический сервопривод состоит из двигателя, датчика позиции и системы управления, имеющей три контура регулирования (по позиции, скорости и току).






Слово «серво» произошло от латинского слова «servus», что переводится как слуга, раб, помощник. В машиностроительных отраслях они были преимущественно вспомогательными приводами (приводы подач в станках, приводы роботов и т.п.). Однако сегодня ситуация изменилась, теперь и главные приводы реализуются с использованием сервотехники.
В настоящее время, сервоприводы применяются там, где недостаточно точности регулирования обычных общепромышленных преобразователей частоты. Применение высококачественных сервоприводов необходимо в высокопроизводительном оборудовании, где главным критерием является производительность. Сервоприводами оснащаются прецизионные системы поддержания скорости и позиционирования промышленных роботов и высокоточных станков. Сервоприводы также устанавливаются на координатно-сверлильных станках, на различных технологических транспортных системах, на различных вспомогательных механизмах и др. В приводах подач современных станков с ЧПУ обеспечивающих перемещения рабочих органов станка, на сегодняшний день применяются в основном шаговые двигатели, либо сервоприводы.
История[править | править код]
Обзор серводвигателей
Серводвигатели – это специальный тип двигателей, который в отличие от большинства других двигателей предназначен для точного позиционирования, а не для управляемой скорости. Это делает их хорошим выбором при создании роботов.
 Серводвигатели широко используются в роботах, поскольку они позволяют контроллерам роботов устанавливать соединения под точными углами.
Серводвигатели широко используются в роботах, поскольку они позволяют контроллерам роботов устанавливать соединения под точными углами.
Таким образом, в отличие от коллекторных двигателей, которые при подаче различных напряжений могут работать на определенных скоростях, при использовании серводвигателя компьютер посылает сигнал команды, которая указывает серводвигателю перейти к конкретному углу:
Названия селитр[править | править код]
Заключение
Сервоприводы играют очень важную роль для многих проектов Ардуино, от робототехнических до систем умного дома. Все, что связано с движением, традиционно требует особых знаний и создать полноценный правильно работающий привод – непростая задача. Но с помощью серводвигателей можно во многих случаях упростить задачу, поэтому серво постоянно используется даже в проектах начального уровня.
В этой статье мы постарались раскрыть разные аспекты использования сервоприводов в проектах arduino: от подключения до написания скетчей. Выбрав самую простую модель серво (например, sg 90) вы сможете без труда повторить приведенные примеры и создать свои первые проекты, в которых что-то движется и изменяется. Надеемся, эта статья поможет вам в этом.
Заключение
Сегодня на российском рынке представлено множество брендов, которые предлагают свои решения в области сервоприводов. Одной из таких компаний является Kollmorgen. Используя прямые приводы ее производства, можно повысить точность технологии передачи движения и пропускную способность оборудования, а также снизить затраты на детали и исправления погрешностей передаточных элементов.