Радиолокационные экраны.
Для измерений времени, прошедшего от момента посылки РЛС исходного импульса до момента получения отраженного, используется экран телевизионного типа. Радиолокационные экраны нескольких типов показаны на рис. 2. Поперек экрана типа A электронный луч прочерчивает горизонтальную линию развертки. Посылаемый радиолокатором и принятый отраженный сигналы вызывают отклонения электронного луча в вертикальном направлении. Расстояние между этими двумя пиками служит мерой времени, которое сигнал затратил на прохождение расстояния до цели и обратно. На линии развертки может быть нанесена шкала расстояний до цели в метрах или километрах. Разработан трехмерный радиолокационный индикатор, на экране которого отображались дальность до цели, ее азимут и угол возвышения. Этот экран, известный как экран типа G, позднее был приспособлен для использования в системах управления воздушным движением.

Литература
- Поляков В. Т. Посвящение в радиоэлектронику. — М.: Радио и связь, 1988. — 352 с. — (МРБ. Выпуск 1123). — 900 000 экз. — ISBN 5-256-00077-2.
- Леонов А. И. Радиолокация в противоракетной обороне. — М.: Воениздат, 1967. — 136 с. — (Радиолокационная техника).
- Радиолокационные станции бокового обзора / Под редакцией А. П. Реутова. — М.: Советское радио, 1970. — 360 с. — 6700 экз.
- Радиолокационные станции воздушной разведки / Под редакцией Г. С. Кондратенкова. — М.: Воениздат, 1983. — 152 с. — 18 000 экз. — ISBN 200001705124.
- Мищенко Ю. А. Загоризонтная радиолокация. — М.: Воениздат, 1972. — 96 с. — (Радиолокационная техника).
- Бартон Д. Радиолокационные системы / Сокращённый перевод с английского под редакцией К. Н. Трофимова. — М.: Воениздат, 1967. — 480 с.
- Шембель Б. К. У истоков радиолокации в СССР. — М.: Советское радио, 1977. — 80 с.
- Водопьянов Ф. А. Радиолокация. — М., 1946.
- Рыжов К. В. 100 великих изобретений. — М.: Вече, 2009. — 480 с. — (100 великих). — ISBN 5-7838-0528-9.
- Bowen, Edward George. Radar Days. — CRC Press, 1998. — ISBN 9780750305860.
Принцип радиолокации
Радиотехническое оборудование и средства, предназначенные для выполнения задач радиолокации, получили название радиолокационных систем, или устройств (РЛС или РЛУ). Основы радиолокации базируются на следующих физических явлениях и свойствах:
- В среде распространения радиоволны, встречая объекты с иными электрическими свойствами, рассеиваются на них. Волна, отраженная от цели (или ее собственное излучение), позволяет радиолокационным системам обнаружить и идентифицировать цель.
- На больших расстояниях распространение радиоволн принимается прямолинейным, с постоянной скоростью в известной среде. Это допущение делает возможным измерение дальности до цели и ее угловых координат (с определенной ошибкой).
- На основании эффекта Доплера по частоте принятого отраженного сигнала вычисляют радиальную скорость точки излучения относительно РЛУ.
Основные параметры систем
От тактических и технических характеристик оборудования во многом зависит эффективность и качество решаемых задач.
К тактическим показателям РЛС причисляют:
- Зону обзора, ограниченную минимальной и максимальной дальностью обнаружения цели, допустимым азимутальным углом и углом возвышения.
- Разрешающую способность по дальности, азимуту, элевации и скорости (возможность определять параметры рядом расположенных целей).
- Точность измерений, которая измеряется наличием грубых, систематических или случайных ошибок.
- Помехозащищенность и надежность.
- Степень автоматизации извлечения и обработки поступающего потока информационных данных.
Заданные тактические характеристики закладываются при проектировании устройств посредством определенных технических параметров, среди которых:
- несущая частота и модуляция генерируемых колебаний;
- диаграммы направленности антенн;
- мощность передающих и принимающих устройств;
- габаритные размеры и масса системы.
Методы и оборудование
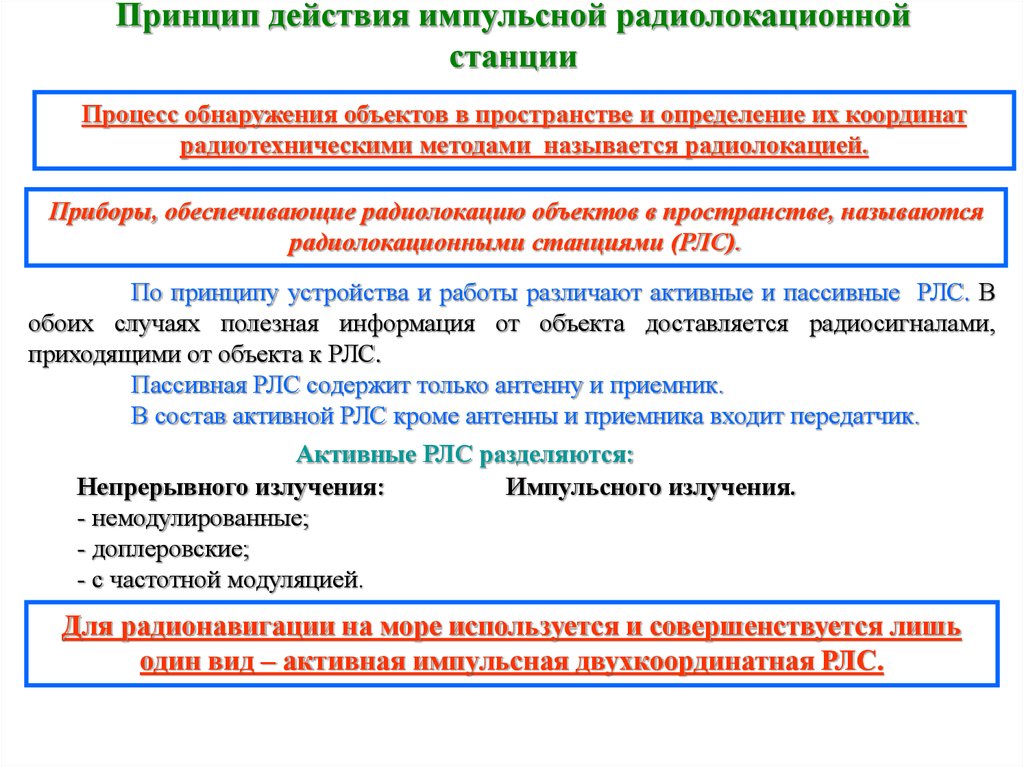
Все средства радиолокации по используемому методу разделяют на РЛС непрерывного и импульсного излучения.
Первые содержат в своем составе передатчик и приемник излучения, действующие одновременно и непрерывно. По этому принципу были созданы первые радиолокационные устройства. Примером такой системы могут служить радиоальтиметр (авиационный прибор, определяющий удаление летательного аппарата от поверхности земли) или известный всем автолюбителям радар для определения скоростного режима транспортного средства.
При импульсном методе электромагнитная энергия излучается короткими импульсами в течение нескольких микросекунд. После генерации сигнала станция ведет работу только на прием. После улавливания и регистрации отраженных радиоволн РЛС передает новый импульс и циклы повторяются.
Литература
- Erickson, John; «Radiolocation and the air defense problem: The design and development of Soviet Radar 1934-40», Social Studies of Science, vol. 2, pp. 241—263, 1972
- Ширман Я. Д., Голиков В. Н., Бусыгин И. Н., Костин Г. А. Теоретические основы радиолокации / Ширман Я. Д.. — М.: Советское радио, 1970. — 559 с.
- Справочник по радиолокации / Сколник М.И.. — М., 2014. — 1352 с. — ISBN 978-5-94836-381-3.
- Справочник по радиолокации / Сколник М.И.. — М., 2014. — 1352 с. — ISBN 978-5-94836-381-3.
- Бакут П. А., Большаков И. А., Герасимов Б. М., Курикша А. А., Репин В. Г., Тартаковский Г. П., Широков В. В. Вопросы статистической теории радиолокации. — М.: Советское радио, 1963. — 423 с.
Основные факторы
Основными моментами в противостоянии с авиацией были:
- Применение для скрытия самолётов и вертолётов пассивных маскирующих помех в виде распыляемых в воздухе кусочков фольги, отражающей радиоволны. Ответом на это было внедрение в радиолокаторах систем селекции движущихся целей, которая на основе доплеровского эффекта отличает движущиеся самолёты от сравнительно неподвижной фольги.
- Развитие технологий построения самолётов и кораблей, уменьшающих мощность отражённого назад к радиолокатору сигналов, получивших название Стелс. Для этого служат и специальные поглощающие покрытия, и специальная форма, отражающая падающую радиоволну не назад, а в другом направлении.
Перспективы развития
Для современной радиолокационной станции главным оценочным критерием выступает соотношение эффективности и качества. Под эффективностью понимаются обобщенные тактико-технические характеристики оборудования. Создание совершенной РЛС — сложная инженерная и научно-техническая задача, осуществление которой возможно только с использованием новейших достижений электромеханики и электроники, информатики и вычислительной техники, энергетики.
По прогнозам специалистов, в ближайшем будущем главными функциональными узлами станций самого разного уровня сложности и назначения будут твердотельные активные ФАР (фазированные антенные решетки), преобразующие аналоговые сигналы в цифровые. Развитие вычислительного комплекса позволит полностью автоматизировать управление и основные функции РЛС, предоставив конечному потребителю всесторонний анализ полученной информации.
Радиолокация
- Подробности
- Просмотров: 342
«Физика — 11 класс»
Обнаружение и точное определение местонахождения объектов с помощью радиоволн называют радиолокацией.
Радиолокационная установка — радиолокатор (или радар) — состоит из передающей и приемной частей.
В радиолокации используют электрические колебания сверхвысокой частоты (108 — 1011 Гц).
Мощный генератор СВЧ связан с антенной, которая излучает остронаправленную волну.
В радиолокаторах, работающих на длинах волн порядка 10 см и меньше, такая волна создается антеннами в виде параболических зеркал.
Для волн метрового диапазона антенны имеют вид сложных систем вибраторов.
При этом острая направленность излучения получается вследствие сложения волн.
Антенна устроена так, что волны, посланные каждым из вибраторов, при сложении взаимно усиливают друг друга лишь в заданном направлении.
В остальных направлениях происходит полное или частичное их взаимное гашение.
Отраженная волна улавливается либо той же излучающей антенной, либо другой приемной антенной, тоже остронаправленной.
Строгая направленность излучения позволяет говорить о луче радиолокатора.
Направление на объект и определяется как направление луча в момент приема отраженного сигнала.






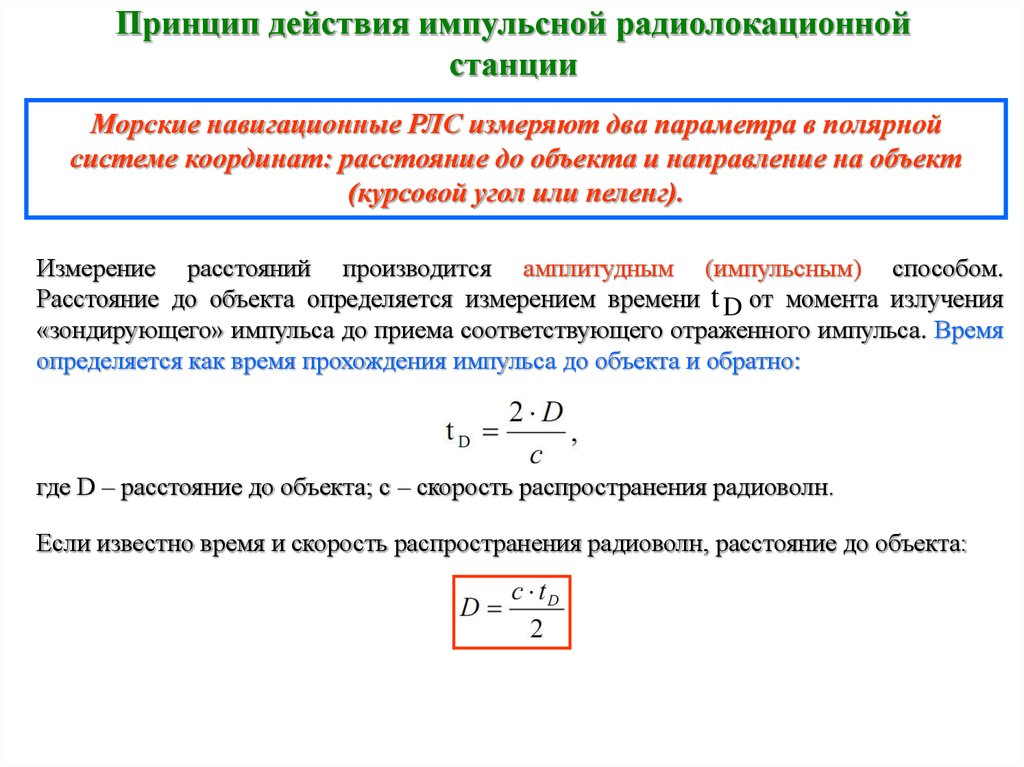
Для определения расстояния до цели применяют импульсный режим излучения.
Передатчик излучает волны кратковременными импульсами.
Длительность каждого импульса составляет миллионные доли секунды, а промежуток между импульсами примерно в 1000 раз больше.
Во время пауз принимаются отраженные волны.
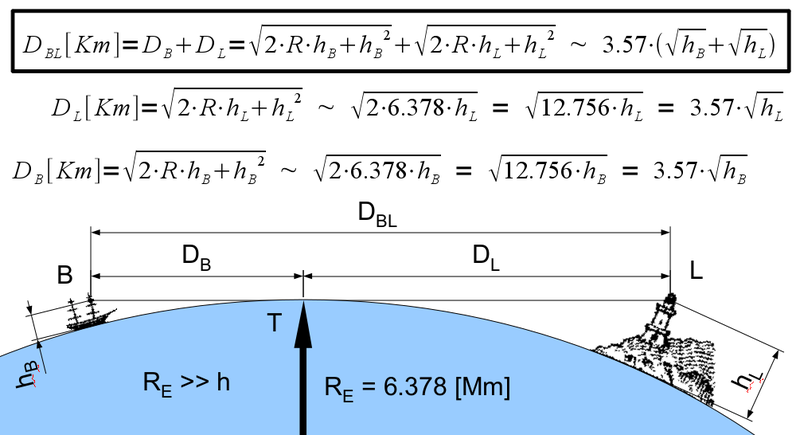
Определение расстояния R проводится путем измерения общего времени t прохождения радиоволн до цели и обратно.
Так как скорость радиоволн с = 3 • 108 м/с в атмосфере практически постоянна на всем пути луча, то
Вследствие рассеяния радиоволн до приемника доходит лишь ничтожная часть той энергии, которую излучает передатчик.
Потому приемники радиолокаторов усиливают принятый сигнал в миллионы миллионов раз (1012).
Такой чувствительный приемник, разумеется, должен быть отключен на время посылки импульса передатчиком.
Для фиксации посланного и отраженного сигналов используют электронно-лучевую трубку.
В момент посылки импульса светлая точка, равномерно движущаяся по экрану электронно-лучевой трубки, отклоняется.
На экране появляется всплеск около нулевой отметки шкалы дальности.
Светящееся пятнышко на экране продолжает равномерно двигаться вдоль шкалы и в момент приема слабого отраженного сигнала снова отклоняется.
Расстояние между всплесками на экране пропорционально времени t прохождения сигнала и, следовательно, расстоянию R до цели.
Это позволяет проградуировать шкалу непосредственно в километрах.
Радиолокационные установки обнаруживают корабли и самолеты на расстояниях до нескольких сот километров.
На их работу лишь незначительно влияют условия погоды и время суток.
В больших аэропортах локаторы следят за взлетающими и идущими на посадку самолетами.
Наземная служба передает по радио пилотам необходимые указания и таким образом обеспечивает безопасность полетов.
Корабли и самолеты также снабжены радиолокаторами, служащими для навигационных целей.
Такие локаторы создают на экране картину расположения объектов, рассеивающих радиоволны, и оператор видит радиолокационную карту местности.
В настоящее время применение радиолокации становится все более разнообразным.
С помощью локаторов наблюдают метеоры в верхних слоях атмосферы.
Локаторы используются службой погоды для наблюдения за обланами.
Локаторы используются в космических исследованиях.
Каждый космический корабль обязательно имеет на борту несколько радиолокаторов.
В 1946 г. в США и Венгрии был осуществлен эксперимент по приему сигнала, отраженного от поверхности Луны.
В 1961 г. учеными нашей страны произведена радиолокация планеты Венера, что позволило оценить период ее вращения вокруг своей оси.
В настоящее время осуществлена локация и других планет Солнечной системы.
Радиолокаторы используются для обнаружения самолетов и кораблей, в службе погоды, для локации планет и др.
Следующая страница «Понятие о телевидении. Развитие средств связи»
Назад в раздел «Физика — 11 класс, учебник Мякишев, Буховцев, Чаругин»
Электромагнитные волны. Физика, учебник для 11 класса — Класс!ная физика
Что такое электромагнитная волна —
Экспериментальное обнаружение электромагнитных волн —
Плотность потока электромагнитного излучения —
Изобретение радио А. С. Поповым. Принципы радиосвязи —
Модуляция и детектирование —
Свойства электромагнитных волн —
Распространение радиоволн —
Радиолокация —
Понятие о телевидении. Развитие средств связи —
Краткие итоги главы
Дальность действия РЛС
Основная статья: Основное уравнение радиолокации
Максимальная дальность действия РЛС зависит от ряда параметров и характеристик как антенной системы станции, мощности излучаемого сигнала, и чувствительности приёмника системы.
В общем случае без учёта потерь мощности в атмосфере, помех и шумов дальность действия системы можно определить следующим образом:
- Dmax=PnDaSaσ(4π)2Pn.min4{\displaystyle D_{max}={\sqrt{\frac {P_{n}D_{a}S_{a}\sigma }{\left(4\pi \right)^{2}P_{n.min}}}}},
где:
- Pn{\displaystyle \;P_{n}} — мощность генератора;
- Da{\displaystyle \;D_{a}} — коэффициент направленного действия антенны;
- Sa{\displaystyle \;S_{a}} — эффективная площадь антенны;
- σ{\displaystyle \;\sigma } — эффективная площадь рассеяния цели;
- Pn.min{\displaystyle \;P_{n.min}} — минимальная чувствительность приёмника.
При наличии шумов и помех дальность действия РЛС уменьшается.
Влияние помех
Работа нескольких РЛС в одном частотном диапазоне
На загруженных участках, где одновременно используются многочисленные РЛС (например, морские порты) вероятны совпадения частотных диапазонов. Это приводит к приему РЛС сигнала другой РЛС. В результате на экране появляются дополнительные точки, бросающиеся в глаза из-за своей геометрической правильности. Эффект может быть убран переходом на другую рабочую частоту.




Мнимое изображение
При отражении радиосигнала от массивного объекта возможно дальнейшее распространение к меньшим объектам с последующим отражением и попаданием в РЛС. Таким образом, путь, который прошел сигнал становится больше и на экране появляется мнимое изображение объекта, который на самом деле находится в другом месте
Такой эффект должен приниматься во внимание при нахождении вблизи крупных отражающих объектов, таких как мосты, гидротехнические сооружения и крупные суда.
Многократное отражение
При размещении РЛС на большом судне возможен эффект многократного отражения сигнала. Сигнал РЛС отражается от близкого объекта, частично попадает обратно в РЛС, а частично отражается от корпуса суда. Таких отражений может быть много, амплитуда при каждом отражении уменьшается и сигнал будет восприниматься до тех пор, пока не будет достигнута пороговая чувствительность приемника. На экране радара будут видны несколько уменьшающихся с каждым разом объектов. Расстояние между ними пропорционально расстоянию от РЛС до объекта.
Атмосферные потери особенно велики в сантиметровом и миллиметровом диапазонах и вызываются дождем, снегом и туманом, а в миллиметровом диапазоне также кислородом и парами воды.
Наличие атмосферы приводит к искривлению траектории распространения радиоволн (явление рефракции). Характер рефракции зависит от изменения коэффициента преломления атмосферы при изменении высоты. Из-за этого траектория распространения радиоволн искривляется в сторону поверхности земли.
Принимаемая мощность
Мощность принимаемого отклика радиосигнала задаётся уравнением:
- Pr=PtGtArσF4(4π)2Rt2Rr2=Pt⋅Gt4πRt2⋅F2⋅σ⋅F2⋅Ar4πRr2{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R_{t}^{2}R_{r}^{2}}}=P_{t}\cdot {{G_{t}} \over {4\pi R_{t}^{2}}}\cdot F^{2}\cdot {\sigma }\cdot F^{2}\cdot {{A_{r}} \over {4\pi R_{r}^{2}}}}
Обозначения:
- Pr — мощность сигнала приёмной антенны;
- Pt — мощность радиопередатчика;
- Gt — коэффициент усиления передающей антенны;
- Ar (иногда S) — эффективная площадь (апертура) приемной антенны, Ar = Gr*λ²/4π, где Gr — коэффициент усиления приемной антенны, λ — длина волны.
- σ — эффективная площадь рассеяния цели в данном ракурсе;
- F — коэффициент потерь при распространении сигнала;
- Rt — расстояние от передающей антенны до цели;
- Rr — расстояние от цели до приёмной антенны.
В случае, когда передающая и приёмная антенны располагаются на одинаковом расстоянии от цели, то есть во всех моностатических РЛС (Однопозиционных радиолокационных системах, ОПРЛС) и иногда, в других типах, формула упрощается за счет Rt = Rr = R, что приводит к коэффициенту R4:
- Pr=PtGtArσF4(4π)2R4.{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R^{4}}}.}
Таким образом, принимаемая мощность уменьшается пропорционально 4-й степени расстояния.
Коэффициент F можно принять равным 1, если считать, что волна распространяется в вакууме без потерь и без интерференции.
Классификация

Мобильная РЛС «Противник-ГЕ»
По сфере применения различают:
- военные РЛС;
- гражданские РЛС.
По назначению:
- РЛС обнаружения;
- РЛС управления и слежения;
- панорамные РЛС;
- РЛС бокового обзора;
- метеорологические РЛС;
- РЛС целеуказания;
- РЛС контрбатарейной борьбы;
- РЛС обзора обстановки.
По характеру носителя:
- береговые РЛС;
- морские РЛС;
- бортовые РЛС;
- мобильные РЛС.
По типу действия:
- первичные, или пассивные;
- вторичные, или активные;
- совмещённые.
По методу действия:
- надгоризонтный радиолокатор;
- загоризонтный радиолокатор.
По диапазону волн:
- метровые;
- дециметровые;
- сантиметровые;
- миллиметровые.
Принцип действия
Радиолокация основана на следующих физических явлениях:
- Радиоволны рассеиваются на встретившихся на пути их распространения электрических неоднородностях (объектами с другими электрическими свойствами, отличными от свойств среды распространения). При этом отражённая волна, также, как и собственно, излучение цели, позволяет обнаружить цель.
- На больших расстояниях от источника излучения можно считать, что радиоволны распространяются прямолинейно и с постоянной скоростью, благодаря чему имеется возможность измерять дальность и угловые координаты цели (Отклонения от этих правил, справедливых только в первом приближении, изучает специальная отрасль радиотехники — Распространение радиоволн. В радиолокации эти отклонения приводят к ошибкам измерения).
- Частота принятого сигнала отличается от частоты излучаемых колебаний при взаимном перемещении точек приёма и излучения (эффект Доплера), что позволяет измерять радиальные скорости движения цели относительно РЛС.
- Пассивная радиолокация использует излучение электромагнитных волн наблюдаемыми объектами, это может быть тепловое излучение, свойственное всем объектам, активное излучение, создаваемое техническими средствами объекта, или побочное излучение, создаваемое любыми объектами с работающими электрическими устройствами.
Раздел: Вторичная радиолокация
Рисунок 1. Предварительный просмотр интернет-представительства

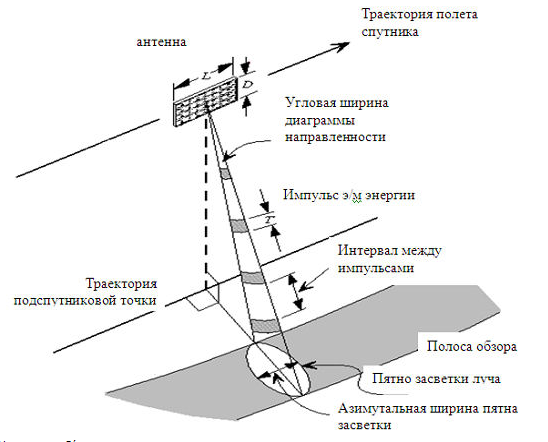
Рисунок 2. Антенна широкой вертикальной апертуры
Рисунок 1. Антенна широкой вертикальной апертуры
Радиолокация зародилась в ответ на потребности, вызванные войной.
Необходимость обнаружения самолетов противника на больших расстояниях привела к огромным интеллектуальным и финансовым вложениям в развитие радиолокации
(англ. RADAR – акроним от RAdio Detection And Ranging).
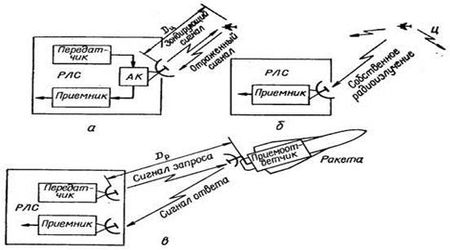
Классическую радиолокационную технологию называют активной радиолокацией с пассивным ответом.
Это означает, что такая технология не предполагает какого-либо активного ответа со стороны обнаруживаемого воздушного объекта
на запрос (зондирующий сигнал) радиолокатора.
Зачем же понадобилась другая технология?




По мере разработки и применения радиолокаторов, вскоре стало ясно, что, помимо наблюдения за самолетами противника,
радиолокатор является хорошим средством для наблюдения и за своими («дружественными») воздушными объектами.
Следовательно, радиолокаторы могут применяться для контроля за последними и для управления ими.
Если «дружественный» самолет оснащен радиолокационным ответчиком, или транспондером
(transponder = transmitting responder),
то, приняв запросный сигнал радиолокатора, он посылает в ответ мощный сигнал в качестве эхо-сигнала.
Такой ответный сигнал генерируется транспондером и является кодированным.
Полученная таким образом новая возможность оказалась очень полезной для военных пользователей,
поскольку теперь можно было четко отличить свой самолет (отвечает на запрос) от самолета противника (не отвечает на запрос).
Кроме этого, в ответе может содержаться гораздо больше информации, чем может получить классический радиолокатор,
называемый еще первичным радиолокатором. К дополнительной информации относится, например,
высота
самолета над уровнем моря, индивидуальный код,
признак возникновения каких-либо технических проблем на борту (потеря радиоконтакта и тому подобное).
Цель данного раздела состоит в том, чтобы дать общее представление о принципах функционирования радиолокационных систем с активным ответом,
называемых еще вторичными обзорными радиолокаторами (англ. Secondary Surveillance Radar, SSR).
Во-первых, будет рассмотрена функциональная схема вторичного радиолокатора (режим А/С), включая форматы канала связи и ответных сообщений.
Во-вторых, будут описаны основные аспекты перспективной системы (режим S).
Вторичный радиолокатор
Вторичная радиолокация используется в авиации для опознавания. Основная особенность — использование активного ответчика на самолётах.
Принцип действия вторичного радиолокатора несколько отличается от принципа первичного радиолокатора.
В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик служит для формирования импульсов запроса в антенне на частоте 1030 МГц.
Антенна служит для излучения импульсов запроса и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации антенна излучает на частоте 1030 МГц и принимает на частоте 1090 МГц.
Генераторы азимутальных меток служат для генерации азимутальных меток (англ. Azimuth Change Pulse, ACP) и метки Севера (англ. Azimuth Reference Pulse, ARP). За один оборот антенны РЛС генерируется 4096 малых азимутальных меток (для старых систем) или 16384 улучшенных малых азимутальных меток (англ. Improved Azimuth Change pulse, IACP — для новых систем), а также одна метка Севера. Метка севера приходит с генератора азимутальных меток при таком положении антенны, когда она направлена на Север, а малые азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник служит для приёма импульсов на частоте 1090 МГц.
Сигнальный процессор служит для обработки принятых сигналов.
Индикатор служит для отображения обработанной информации.
Самолётный ответчик с антенной служит для передачи содержащего дополнительную информацию импульсного радиосигнала обратно в сторону РЛС по запросу.
Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика для определения положения воздушного судна. РЛС облучает окружающее пространства запросными импульсами P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Оборудованные ответчиками воздушные суда, находящиеся в зоне действия луча запроса, при получении запросных импульсов, если действует условие P1,P3>P2, отвечают запросившей РЛС серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация о номере борта, высоте и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется интервалом времени между запросными импульсами P1 и P3, например, в режиме запроса А (mode A) интервал времени между запросными импульсами станции P1 и P3 равен 8 микросекундам и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта.
В режиме запроса C (mode C) интервал времени между запросными импульсами станции равен 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту.
Также РЛС может посылать запрос в смешанном режиме, например, Режим А, Режим С, Режим А, Режим С.
Азимут воздушного судна определяется углом поворота антенны, который, в свою очередь, определяется путём подсчёта малых азимутальных меток.
Дальность определяется по задержке пришедшего ответа. Если воздушное судно находится в зоне действия боковых лепестков, а не основного луча, или находится сзади антенны, то ответчик воздушного судна при получении запроса от РЛС получит на своём входе условие, что импульсы P1,P3<P2, то есть импульс подавления больше импульсов запроса. В этом случае ответчик запирается и не отвечает на запрос.
Принятый от ответчика сигнал обрабатывается приёмником РЛС, затем поступает на сигнальный процессор, который проводит обработку сигналов и выдачу информации конечному потребителю и (или) на контрольный индикатор.
Плюсы вторичной РЛС:
- более высокая точность;
- дополнительная информация о воздушном судне (номер борта, высота);
- малая по сравнению с первичными РЛС мощность излучения;
- большая дальность обнаружения.
Связь с другими отраслями науки
Основным фактором, ограничивающим технические характеристики локаторов, является малая мощность принимаемого сигнала. При этом мощность принимаемого сигнала убывает как четвёртая степень дальности (то есть, чтобы увеличить дальность действия локатора в 10 раз нужно увеличить мощность передатчика в 10000 раз). Естественно, на этом пути быстро пришли к пределам, преодолеть которые было далеко не просто. Уже в самом начале развития был осознан тот факт, что имеет значение не сама мощность принимаемого сигнала, а его заметность на фоне шумов приёмника. Снижение шумов приёмника также было ограничено естественными шумами элементов приёмника, например тепловыми. Данный тупик был преодолён на пути усложнения методов обработки принятого сигнала и связанного с этим усложнения формы применяемых сигналов. Развитие радиолокации как научной отрасли знаний шло одновременно с развитием кибернетики и теории информации, и потребовались бы специальные исследования, чтобы решить, где именно были получены первые результаты. Следует отметить появление понятия сигнала, который позволил отвлечься от конкретных физических процессов в приёмнике, таких как напряжение и ток, и позволил решать стоящие проблемы как математическую задачу о поиске наилучших функциональных преобразованиях функций времени.






Одной из первых работ в этой области была работа В. А. Котельникова об оптимальном приёме сигнала, то есть наилучшем в условии шумов методе обработки сигнала. В результате было доказано, что качество приёма зависит не от мощности сигнала, а от его энергии, то есть произведения мощности на время, таким образом, появилась доказанная возможность увеличения дальности действия за счёт увеличения длительности сигналов, в пределе до непрерывного излучения. Значительным шагом вперед стало отчётливое применение в технике методов статистической теории решений (критерий Неймана-Пирсона) и принятие того факта, что исправное устройство может работать с определённой долей вероятности. Для того, чтобы радиолокационный сигнал при большой длительности позволял измерять дальность и скорость с высокой точностью, потребовались сложные сигналы, в отличие от простых радиолокационных импульсов, изменяющие какие-либо характеристики в процессе генерации. Так. сигналы с линейной частотной модуляцией изменяют частоту колебаний в течение одного импульса, сигналы с фазовой манипуляцией скачкообразно изменяют фазу сигнала, обычно на 180 градусов. При создании сложных сигналов было сформулировано понятие функции неопределённости сигнала, показывающей связь точности измерений дальности и скорости. Необходимость повышения точности измерения параметров стимулировало развитие различных методов фильтрации результатов измерений, например, методов оптимальной нелинейной фильтрации, которые явились обобщением фильтра Калмана на нелинейные задачи. В итоге всех этих разработок теоретическая радиолокация оформилась как самостоятельная сильно математизированная отрасль знаний, в которой значительную роль имеют формализованные методы синтеза, то есть проектирование ведётся в известной мере «на кончике пера».
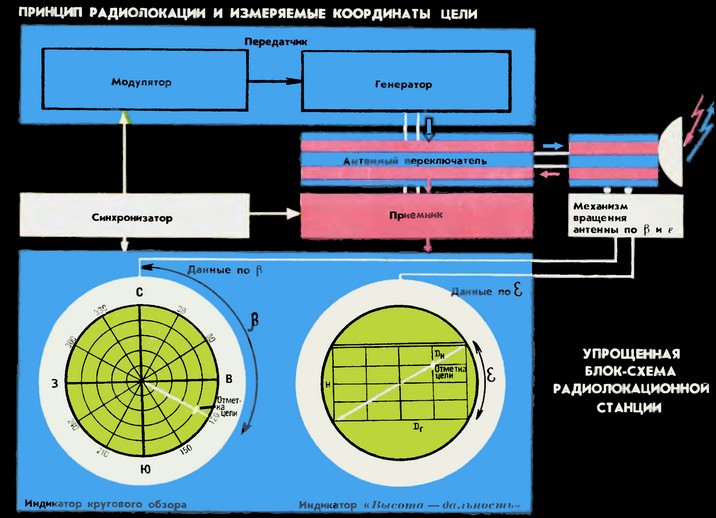
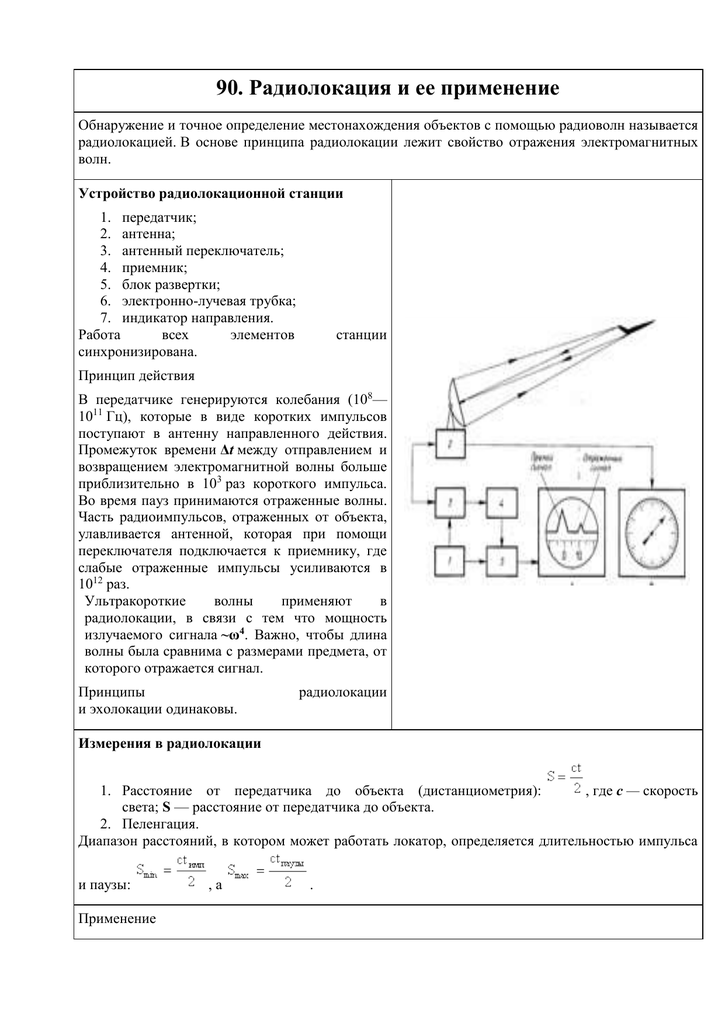
Как работает радиолокатор
Определение местонахождения чего-либо называют локацией. Для этого в технике применяют устройство, называемое локатором. Локатор излучает какой-либо вид энергии, например, звук или оптический сигнал, в сторону предполагаемого объекта, а затем принимает отражённый от него сигнал. Радиолокатор использует для этой цели радиоволны.
На самом деле радиолокатор, или радиолокационная станция (РЛС), — сложная система. Конструкции различных радиолокаторов могут различаться, но принцип их работы одинаков. Радиопередатчик посылает в пространство радиоволны. Достигнув цели, они отражаются от неё, как от зеркала, и возвращаются назад. Такая радиолокация называется активной.
Основные узлы радиолокатора (РЛС) – передатчик, антенна, антенный переключатель, приёмник, индикатор.
По способу излучения радиоволн РЛС делятся на импульсные и непрерывного действия.
Как работает импульсная радиолокационная станция?
Передатчик радиоволн включается на короткое время, поэтому радиоволны излучаются импульсами. Они поступают в антенну, которая располагается в фокусе зеркала параболоидной формы. Это нужно для того, чтобы радиоволны распространялись в определённом направлении. Работа радиолокатора похожа на работу светового прожектора, лучи которого подобным образом направляются в небо и, освещая его, ищут нужный объект. Но работа прожектора этим и ограничивается. А радиолокатор не только посылает радиоволны, но и принимает сигнал, отражённый от найденного объекта (радиоэхо). Эту функцию выполняет приёмник.
Антенна импульсного радиолокатора работает то на передачу, то на приём. Для этого в ней есть переключатель. Как только радиосигнал послан, отключается передатчик и включается приёмник. Наступает пауза, во время которой радиолокатор как бы «слушает» эфир и ждёт радиоэхо. И как только антенна улавливает отражённый сигнал, тут же отключается приёмник и включается передатчик. И так далее. Причём время паузы может во много раз превышать длительность импульса. Таким образом излучаемый и принимаемый сигнал разделяются во времени.
Принятый радиосигнал усиливается и обрабатывается. На индикаторе, который в простейшем случае представляет собой дисплей, отображается обработанная информация, например, размеры объекта или расстояние до него, или сама цель и окружающая её обстановка.
Радиоволны распространяются в пространстве со скоростью света. Поэтому, зная время tот излучения импульса радиосигнала до его возвращения, можно определить расстояние до объекта.
R = cˑt/2,
где с – скорость света.
Радиолокатор непрерывного действия высокочастотные радиоволны излучает непрерывно. Поэтому антенной улавливается также непрерывный отражённый сигнал. В своей работе такие РЛС используют эффект Доплера. Суть этого эффекта в том, что частота сигнала, отражённого от объекта, движущегося по направлению к радиолокатору, выше частоты сигнала, отражённого от объекта, удаляющегося от него, несмотря на то, что частота излучаемого сигнала постоянна. Поэтому такие РЛС используют для определения параметров движущегося объекта. Пример радиолокатора, в основе работы которого лежит эффект Доплера – радар, используемый сотрудниками ГИБДД для определения скорости движущегося автомобиля.
В поисках объекта направленный луч антенны РЛС сканирует пространство, описывая полный круг, либо выбирая определённый сектор. Он может быть направлен по винтовой линии, по спирали. Обзор также может быть коническим или линейным. Всё зависит от задачи, которую он должен выполнить.
Если необходимо постоянно следить за выбранной движущейся целью, антенна радиолокатора всё время направлена на неё и поворачивается вслед за ней с помощью специальных следящих систем.