Определяющие характеристики
Как отличить компьютер от микроконтроллера? Если первый представляет собой устройство общего назначения, которое может запускать тысячи различных программ, то второй является специализированным, ориентированным на одно приложение. Существует и ряд других характеристик, которые позволяют отличить микроконтроллеры. Для начинающих пользователей это проблемой не будет – достаточно установить наличие у чипа большинства нижеперечисленных качеств, чтобы можно было смело отнести его к данной категории.
- Микроконтроллеры являются элементами какого-либо другого устройства (часто бытовой техники) для управления его функциями или работой. Еще их называют встроенными контроллерами.
- Устройство предназначено для выполнения одной задачи и запуска одной конкретной программы, хранящейся в ПЗУ, которая обычно не изменяется.
- Микроконтроллеры – это маломощные чипы. Их мощность при питании от батареи составляет около 50 мВт. Настольный компьютер почти всегда подключен к розетке и потребляет 50 Вт и больше.
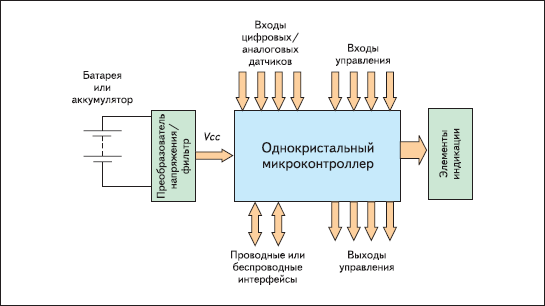
- Микроконтроллер отличается наличием специального блока ввода и часто (но не всегда) небольшого светодиода или ЖК-дисплея для вывода. Принимает входные данные от устройства, которым он управляет, посылая сигналы различным его компонентам. Например, микроконтроллер телевизора получает сигналы с ПДУ и отображает вывод на экране телевизора. Он управляет селектором каналов, динамиками и некоторыми настройками изображения, такими как контраст и яркость. Контроллер автомобильного двигателя принимает входные сигналы от датчиков кислорода и детонации, регулирует создание топливной смеси и синхронизирует работу свечей зажигания. В микроволновой печи он принимает ввод с клавиатуры, отображает вывод на ЖК-дисплее и управляет реле включения и отключения СВЧ-генератора.
- Микроконтроллеры – это зачастую небольшие и недорогие устройства. Компоненты выбираются таким образом, чтобы минимизировать размеры и максимально удешевить производство.
- Часто, но не всегда, работа микроконтроллера осуществляется в неблагоприятных условиях. Например, устройство управления двигателем автомобиля должно работать в экстремальных температурах, при которых обычный компьютер вообще не может функционировать. На севере микроконтроллер автомобиля должен функционировать при температуре -34 °C, а на юге — при 49 °C. В моторном отсеке температура может достигать 65–80 °C. С другой стороны, микроконтроллер, встроенный в проигрыватель Blu-ray, вообще не должен быть особо прочным.

Программы для микроконтроллера
Как уже упоминалось выше, микроконтроллер подобен ПК, а это значит, что, как и ПК, AVR также может выполнять какую-либо программу, хотя и всего одну в какой-либо момент времени.
Программа микроконтроллера может храниться во встроенной памяти контроллера и представляет собой серию очень простых команд, которые выбирают данные и осуществляют с ними операции. В большинстве случаев это означает считывание входящих данных, проверка их состояния и вывода соответствующих выходных данных. Иногда может потребоваться изменение данных и совершение с ними некоторых операций, а также передача данных какому-либо внешнему устройству, например, индикатору, или последовательному порту.
Для таких элементарных задач используются наборы двоичных команд, каждая из которых имеет аналог на более доступном человеческому восприятию языке ассемблера. Поэтому наиболее распространенным способом написания программ для контроллера является написание их на языке ассемблера.
Преимуществом ассемблера является очень быстрый, компактный и эффективный код, но создание таких программ одновременно требует и глубоких знаний работы процессора контроллера, ручного управления памятью и контроля структуры программы. Поэтому зачастую для написания программ используются и языки высокого уровня, такие, как С, Basic и Java. В этом случае задачу по контролю структуры программы и управлению памятью берет на себя компилятор. Кроме того, часто используемые функции могут быть при этом помещены в библиотеки и извлекаться из них по мере надобности.
Компиляция программы
Написанный нами код на Си еще вовсе не понятен микроконтроллеру, поскольку МК понимает команды только в двоичной (или шестнадцатеричной) системе, которая представляет собой набор нулей и единиц. Поэтому Си-шный код нужно преобразовать в нули и единицы. Для этого применяется специальная программа, называемая компилятор, а сам процесс преобразования кода называется компиляция.
Далее откомпилированный готовый код нужно поместить в микроконтроллер, а точнее записать его в память микроконтроллера или, проще говоря, прошить микроконтроллер.
Для прошивки МК применяется устройство, называемое программатор. В зависимости от типа программатора вход его подключается к COM или USB порту, а выход к определенным выводам микроконтроллера.
Существует широкий выбор программаторов и отладочных плат, однако нас вполне устроит самый простой программатор , который в Китае стоит не более 3 $.
После того, как микроконтроллер прошит, выполняется отладка и тестирование программы на реальном устройстве или, как еще говорят, на «железе».
Теперь давайте подытожим этапы программирования микроконтроллеров.
При написании простых программ можно обойтись без второго пункта, т. е. без составления алгоритма на бумаге, его достаточно держать в голове.









Следует заметить, что отладку и тестирование программы также выполняют до прошивки МК.
Что такое микроконтроллер?
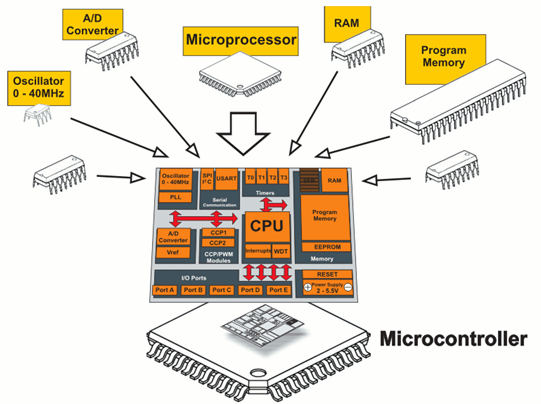
Микроконтроллер по сути дела является небольшим компьютером, выполненным в виде небольшой микросхемы, в которой на одном «кристалле» содержатся все основные компоненты: процессор, периферия, устройства ввода-вывода, а также, чаще всего, оперативная память (ОЗУ) и энергонезависимая память (ПЗУ). Конечно, мощность такого компьютера совсем небольшая и не сравниться с мощностью настольного или портативного компьютера. Но ведь далеко не для всех задач она и нужна — для относительно простых зада и применяют микроконтроллеры, и их мощности предостаточно. Основным же плюсом использования одного микроконтроллера, в котором интегрированы все необходимые компоненты, вместо россыпи отдельных микросхем (процессор, ОЗУ, ПЗУ, периферия), является снижение стоимости, размеров, энергопотребления, а также затрат на разработку и сборку необходимого устройства. Ранее микроконтроллеры называли «однокристальными микро-ЭВМ», но со временем это название было вытеснено более современным (и лучше отражающим предназначение этого девайса) словом микроконтроллер (от англ. слова control — «управление»).

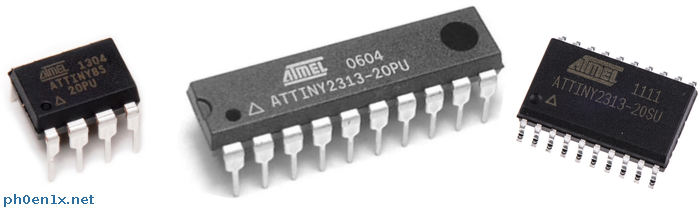
Общий вид микроконтроллера
Впервые такое устройство как микроконтроллер, которое тогда называлось еще однокристальной микро-ЭВМ, было разработано в 1971 году сотрудниками компании Texas Instruments, инженерами М. Кочрену и Г. Буну, которые и предложили интегрировать изобретенный незадолго до этого микропроцессор на один кристалл со всеми необходимыми компонентами.
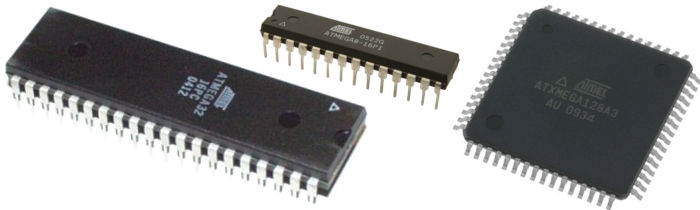
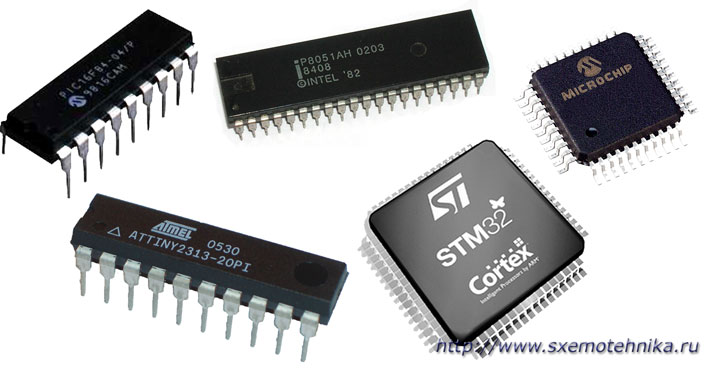
Поскольку под разные задачи лучше всего использовать наиболее подходящие для них микроконтроллеры, а количество применений для микроконтроллеров поистине неиссякаемое, то логично, что компании производители выпускают большое, измеряемое в сотнях, количество самых разнообразных по своим техническим характеристикам микроконтроллеров. По своим характеристикам, микроконтроллеры бывают как совсем простые — четырех разрядные (4 битные) с небольшой рабочей частотой, измеряемой в килогерцах, так и очень навороченные — до 64 битных с тактовой частотой, измеряемой в мегагерцах.
Микроконтроллеры выпускаются очень большим количеством разнообразных компаний, для перечисления которых не хватило бы даже целой статьи, так что я расскажу о микроконтроллерах, которые производит корпорация Атмел (Atmel), основанная в далеком 1984 году. Семейство этих микроконтроллеров зовётся AVR — это восьмибитные микроконтроллеры, разработанные в 1996 году. Фирма Atmel выпускает несколько семейств микроконтроллеров:
- 4-разрядные
- 8-разрядные: MCS-51, AVR
- 32-разрядные: ARM, AVR32
Само семейство микроконтроллеров AVR делится на две большие группы микроконтроллеров: Tiny и Mega. Отличаются они между собой набором функций, которые в них заложены. Основным же различием внутри группы является внутренняя частота и объём памяти, используемый для хранения программы. Большее распространение среди радиолюбителей получили микроконтроллеры семейства Mega по причине того, что они имеют больше возможностей и функций, конкретнее – ATmega8, который имеет тактовую частоту 16 МГц и объём памяти в 8 Кбайт.
Особенности семейства
Прежде всего, микроконтроллеры этой серии являются быстрыми. Большинство инструкций процессор микроконтроллера выполняет за один цикл. Микроконтроллеры AVR примерно в 4 раза быстрее, чем PIC. Кроме того, они потребляют немного энергии и могут работать в 4 режимах экономии энергии.
Большинство контроллеров AVR являются 8-разрядными, хотя сейчас существует и 32-разрядная разновидность контроллеров AVR32. Кроме того, как уже упоминалось выше, AVR принадлежат к типу RISC-микроконтроллеров. Архитектура RISC (Complex Instruction Set Computers) означает, что набор инструкций, которые может выполнять процессор устройства, является ограниченным, но, в то же время, подобная архитектура дает преимущество в скорости. Противоположностью архитектуры RISC является архитектура CISC (Complex Instruction Set Computers).
 32-разрядная разновидность контроллеров AVR32
32-разрядная разновидность контроллеров AVR32
8-битность контроллера означает, что он способен передавать и принимать 8-битные данные. Доступные регистры ввода/вывода также являются 8-битными.





Архитектура контроллера основана на регистрах. Это означает, что для хранения исходных данных операции и ее результата в контроллере используются регистры.
Процессор контроллера берет данные из двух входных регистров, выполняет логическую операцию и сохраняет результат в выходном регистре. Все это занимает 1 исполняемый цикл.
Выбор языка программирования и среды разработки для программирования
Честно говоря, выбор языка программирования и среды разработки вопрос очень ответственный, навязывать кому-то свои предпочтения и что-то советовать дело довольно-таки трудное.
Давайте попробуем подойти к этому выбору не предвзято, чисто с практической стороны.
1. Существует два основных языка программирования микроконтроллеров — Ассемблер (язык низкого уровня) и Си (язык высокого уровня).
Если мы хотим программировать микроконтроллеры используя полностью все их возможности (а мы это хотим), то необходимо изучать эти два языка.
2. Среда разработки для программирования микроконтроллеров.
Тут выбор большой и очень много мнений. Поэтому можно сказать: «Каждая лягушка хвалит свое болото». Мне, к примеру, очень нравится малораспространенная графическая среда разработки «Algorithm Builder», и «квакать» о ее преимуществах перед другими программами я могу очень долго. Но будем делать выбор, как было сказано выше, не предвзято и практично.
Микроконтроллеры AVR выпускает фирма Atmel, она же предоставляет в наше распоряжение бесплатную среду программирования «Atmel Studio» (бывшая AVR Studio). На ней мы и остановимся.
Интегральная среда разработки (IDE — Integrated development environment) Atmel Studio позволит нам:
— писать программы как на Ассемблере, так и на Си (Почему на Си. Программа «Atmel Studio» позволяет писать программы на трех языках (О чем мы и погорим в первой статье), но есть одно но: программы на Си++ мы рассматривать не будем, по одной причине, и в следующей статье я расскажу об этом
— отладить программу
— перевести программу в машинный код (откомпилировать)
— записать программу в микроконтроллер
Все, выбор мы сделали:
Теперь осталось выполнить два пункта:
1. Обзавестись каким-нибудь стартовым набором (для начала хватит и микроконтроллера ATmega8, нескольких светодиодов, пары кнопок и сопротивлений к ним).
2. Установить (именно установить, а не скачать, и с регистрацией) с официального сайта Atmel (http://www.atmel.com/ru/) программу Atmel Studio.
Программировать микроконтроллеры мы будем с использованием программатора USBASP.
Отдельной статьи по Atmel Studio я писать не буду, будем изучать ее постепенно, по мере надобности и в связке со статьями по устройству и программированию микроконтроллеров.
3. Я добавил в набор очень нужную вещь, она Вам в дальнйшем очень пригодится — USB-TTL преобразователь (конвертер). Почему пригодится:
— русифицируя программу мы установили «Visual Studio-2015», кто не русифицировал программу — установите последнюю версию «Visual Studio», мы не только будем изучать базовую программу «Atmel Studio». К сожалению, на сегодняшний день только программа 2015 года позволяет перейти на русский язык в «Atmel Studio», но а мы с Вами, в «Visual Studio», будем создавать оболочки для работу с МК.
Следующие статьи
Основы программирования микроконтроллеров AVRУстройство и программирование микроконтроллеров AVR в среде Atmel Studio на языках Ассемблер и Си
Published by: Мир микроконтроллеров
Date Published: 10/01/2016
Custom floating point format on FPGA
Всем привет!
В данной статье речь пойдет о числах в формате с плавающей точкой и в частности о реализации специализированного формата FP23 на программируемых логических интегральных схемах (ПЛИС). В рамках конкретного проекта у меня родилась мысль реализовать оптимальный для определенных нужд формат данных с плавающей точкой. В итоге эта мысль переросла в реальный проект, который впоследствии нашел применение в некоторых интересных задачах цифровой обработки сигналов. В статье рассмотрены основные сложности при реализации формата данных floating point на ПЛИС Xilinx, рассмотрены базовые математические операции в формате FP23. Также в конце статьи вы можете найти исходный код проекта, которой можно свободно использовать в своих задачах или на его основе реализовать похожие форматы данных.
Примечания
- Васильев А. Е. , Микроконтроллеры: разработка встраиваемых приложений, изд. «БХВ-Петербург» 2008
- Микропроцессоры и микропроцессорные комплекты интегральных микросхем / под редакцией Шахнова В. А.. — М.: «Радио и связь», 1988. — Т. 2.
- Одноплатные микроЭВМ / Под. ред. В. Г. Домрачева.. — Микропроцессорные БИС и их применение. — М.: Энергоатомиздат, 1988. — С. 128. — ISBN 5-283-01489-4.
- Глава 2. Элементная база отечественных персональных ЭВМ // Справочник по персональным ЭВМ / Под. ред. чл.-корр. АН УССР Б. Н. Малиновского.. — К.: Тэхника, 1990. — С. 384. — ISBN 5-335-00168-2.
- Молчанов А. А., Корнейчук В. И., Тарасенко В. П. и др. Справочник по микропроцессорным устройствам. — К.: Тэхника, 1987. — С. 288.
Управление микроконтроллером
Микроконтроллеры AVR оснащены Гарвардской архитектурой. Каждая из областей памяти располагаются в своем адресном пространстве. Память данных в контроллерах осуществляется посредством регистровой, энергонезависимой и оперативной памяти.
 Микроконтроллер AVR
Микроконтроллер AVR
Регистровая память предусматривает наличие 32 регистров общего назначения, которые объединены в файл, а также служебные регистры для ввода и вывода. И первые, и вторые располагаются в пространстве ОЗУ, однако не являются его частью.







В области РВВ (регистров ввода и вывода) находятся различные служебные регистры — состояния, управления микроконтроллером и т.д., а также регистры, которые отвечают за управление периферийных устройств, являющихся частью микроконтроллера. По сути, управление данными регистрами и является методом управления микроконтроллером.
Назначение ЦАП и АЦП микроконтроллеров AVR
Цифроаналоговыми преобразователями (ЦАП) называют устройства, преобразующие сигнал единиц и нолей (цифровой) в аналоговый (плавно изменяющийся). Главные характеристики – разрядность и частота дискретизации. В АЦП преобразуется аналоговый сигнал в цифровой вид.
Порты с поддержкой АЦП нужны для того, чтобы подключить к микроконтроллеру аналоговые датчики, например, резистивного типа.
ЦАП нашёл своё применение в цифровых фильтрах, где входной сигнал проходит программную обработку и вывод через ЦАП в аналоговом виде, ниже вы видите наглядные осциллограммы. Нижний график – входной сигнал, средний – этот же сигнал, но обработанный аналоговым фильтром, а верхний – цифровой фильтр на микроконтроллере Tiny45. Фильтр нужен для формирования нужного диапазона частот сигнала, а также для формирования сигнала определенной формы.
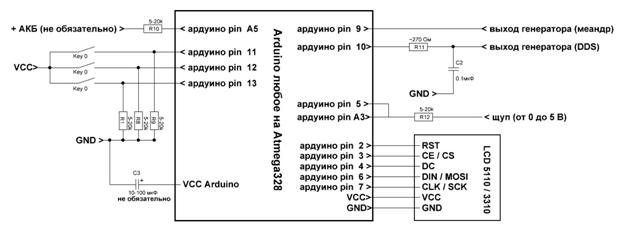
Схема осциллографа на микроконтроллере Atmega328
Пример использования АЦП – это осциллограф на микроконтроллере. К сожалению, частоты мобильных операторов и процессора ПК отследить не удастся, а вот частоты порядка 1 мГц – легко. Он станет отличным помощником при работе с импульсными блоками питания.

А здесь расположено подробное видео этого проекта, инструкции по сборке и советы от автора:
Основные узлы микроконтроллера
Микроконтроллер состоит из центрального процессора (ЦП, CPU), энергонезависимой памяти, энергозависимой памяти, периферийных устройств и вспомогательных цепей.
Центральный процессор (CPU)
Центральный процессор выполняет арифметические операции, управляет потоком данных и генерирует управляющие сигналы в соответствии с последовательностью инструкции, созданных программистом. Эта чрезвычайно сложная схема, необходимая для функциональности процессора, разработчику не видна. Фактически, благодаря интегрированным средам разработки и языкам высокого уровня, таким как C, написание кода для микроконтроллеров часто является довольно простой задачей.
Память
Энергонезависимая память используется для хранения программы микроконтроллера, то есть (часто очень длинного) списка инструкций машинного языка, которые точно указывают процессору, что делать. Обычно вместо «энергонезависимой памяти» вы будете видеть слово «flash» («флеш»), которое относится к определенному типу энергонезависимого хранилища данных.








Энергозависимая память (то есть ОЗУ, RAM) используется для временного хранения данных. Эти данные теряются, когда микроконтроллер теряет питание. Внутренние регистры также обеспечивают временное хранение данных, но мы не рассматриваем их как отдельный функциональный блок, поскольку они интегрированы в центральный процессор.
Периферийные устройства
Мы используем слово «периферия» для описания аппаратных модулей, которые помогают микроконтроллеру взаимодействовать с внешней системой. Следующие пункты описывают различные категории периферийных устройств и приводят их примеры.
-
Преобразователи данных: аналого-цифровой преобразователь, цифро-аналоговый преобразователь, генератор опорного напряжения.
Данный график демонстрирует данные трехосевого акселерометра, оцифрованные с помощью встроенного АЦП микроконтроллера
- Генерирование тактовых сигналов: внутренний генератор, схема на кварцевом резонаторе, петля фазовой автоподстройки частоты.
- Расчет времени: таймер общего назначения, часы реального времени, счетчик внешних событий, широтно-импульсная модуляция.
- Обработка аналоговых сигналов: операционный усилитель, аналоговый компаратор.
- Ввод/вывод: цифровые входные и выходные цепи общего назначения, параллельный интерфейс памяти.
- Последовательная связь: UART, SPI, I2C, USB
Вспомогательные цепи
Микроконтроллеры включают в себя множество функциональных блоков, которые не могут быть классифицированы как периферийные устройства, поскольку их основная цель не состоит в управлении, мониторинге или обмене данными с внешними устройствами. Тем не менее, они очень важны – они поддерживают внутреннюю работу устройства, упрощают реализацию и улучшают процесс разработки.
- Схема отладки позволяет разработчику тщательно контролировать микроконтроллер во время выполнения инструкций. Это важный, а иногда и необходимый метод отслеживания ошибок и оптимизации производительности прошивки.
-
Прерывания являются чрезвычайно ценным видом работы микроконтроллера. Прерывания генерируются внешними или внутренними аппаратными событиями и заставляют процессор немедленно реагировать на эти события, выполняя определенную группу инструкций.
Программы микроконтроллера, написанные на C, организованы в функции. Прерывание заставляет выполнение программы «переходить» в процедуру обработки прерывания (ISR), и после того, как ISR завершил выполнение своих задач, процессор возвращается к функции, которая выполнялась, когда произошло прерывание. - Модуль генерирования тактового сигнала можно считать периферийным устройством, если он предназначен для генерирования сигналов, которые будут использоваться вне микросхемы. Но во многих случаях основная цель внутреннего генератора микроконтроллера состоит в том, чтобы предоставить тактовый сигнал для центрального процессора и периферийных устройств. Внутренние генераторы часто имеют низкую точность, но в приложениях, которые могут допускать эту низкую точность, они являются удобным и эффективными способом упростить конструкцию и сэкономить место на плате.
- Микроконтроллеры могут включать в себя различные типы схем электропитания. Интегрированные стабилизаторы напряжения позволяют в самой микросхеме генерировать необходимое напряжение питания, модули управления питанием могут использоваться для значительного снижения потребления тока устройством в неактивных состояниях, а модули супервизора могут переводить процессор в состояние сброса, когда напряжение питания недостаточно высоко, чтобы обеспечить надежную работу.
Заключение
Вот в принципе и все что изначально полезно знать о структуре микроконтроллера AVR. Дальше, в процессе работы и программирования, у вас будет возможность на практике изучить даташиты для разных моделей AVR чипов, узнать более детально принципы работы каждого из структурных кубиков МК и изучить как они работают, поиграться с отладкой и т.п.
В следующей статье попробуем разобраться с маркировкой микроконтроллеров, поразмышляем о наиболее доступных и подходящих для начального изучения чипах.
Начало цикла статей: Программирование AVR микроконтроллеров в Linux на языках Asembler и C.
Устройства ввода-вывода МК
МК AVR имеют развитую периферию:
- До 86 многофункциональных, двунаправленных GPIO линий ввода-вывода, объединённых в 8-битные порты ввода-вывода. В зависимости от программно-задаваемой конфигурации регистров, могут независимо друг от друга работать в режиме «сильного» драйвера, выдающего или принимающего (на «землю») ток до 40 мА, что достаточно для подключения светодиодных индикаторов. Любой из выводов портов может быть сконфигурирован на «ввод» либо в свободном состоянии, либо с использованием встроенного подтягивающего (на плюс) резистора.
- До 3 внешних источников прерываний (по фронту, срезу, или уровню) и до 32 по изменению уровня на входе.
- В качестве источника тактовых импульсов может быть выбран:
- керамический или кварцевый резонатор (не у всех моделей);
- внешний тактовый сигнал;
- калиброванный внутренний RC-генератор (частота 1, 2, 4, 8 МГц, а также, для некоторых моделей ATtiny — 4,8, 6.4, 9.6 МГц и 128 кГц).
- Внутренняя флеш-память команд до 256 KБ (не менее 10 000 циклов перезаписи).
- Отладка программ осуществляется с помощью интерфейсов JTAG или debugWIRE
сигналы JTAG (TMS, TDI, TDO, и TCK) мультиплексированы на порт ввода-вывода. Режим работы — JTAG или порт — задаётся соответствующим битом в регистре fuses. МК AVR поставляются с включённым интерфейсом JTAG.
:
- Внутренняя память данных EEPROM до 4 КБ (ATmega/ATxmega)/512 байт (ATtiny) (до 100 000 циклов перезаписи).
- Внутренняя память SRAM до 32 KБ (ATxmega)/16 Кб (ATmega)/1 Кб (ATtiny) c временем доступа 2 такта.
- Внешняя память объёмом до 64 КБ (ATmega8515, ATmega162, ATmega640, ATmega641, ATmega1280, ATmega1281, ATmega2560, ATmega256).
- Таймеры c разрядностью 8, 16 бит.
- ШИМ-модулятор (PWM) 8-, 9-, 10-, 16-битный.
- Аналоговые компараторы.
-
АЦП (ADC) с дифференциальными входами, разрядность 8 (ATtiny)/10 (ATtiny/ATmega)/12 (ATxmega) бит:
- программируемый коэффициент усиления перед АЦП 1, 10 и 200 (в дифференциальном режиме);
- в качестве опорного напряжения могут выступать: напряжение питания, внешнее напряжение, или внутреннее некалиброванное опорное напряжение около 2,56 В (для моделей, имеющих минимальное напряжение питания от 2,7 В и выше) либо 1,1 В (с минимальным напряжением питания 1,8 В).
- Различные последовательные интерфейсы, включая:
- двухпроводной интерфейс TWI, совместимый с I²C;
- универсальный синхронно/асинхронный приёмопередатчик UART/USART;
- синхронный последовательный порт Serial Peripheral Interface (SPI).
- USB серия AT90USBxxxx.
- CAN серия AT90CANxxx.
- LCD серии ATmega169 и ATmega329.
- Датчики температуры ATtiny25, ATtiny45, ATtiny85.
- Почти все (за исключением некоторых ранних моделей ATtiny, у которых перепрограммирование идёт по особому интерфейсу) поддерживают внутрисхемное программирование (ISP) через последовательный интерфейс SPI. Многие микроконтроллеры поддерживают альтернативное последовательное или параллельное программирование с использованием высокого напряжения, для случаев, если fuse-регистры были настроены так, что обычное программирование стало недоступно.
- Поддержка самопрограммирования, при котором основная программа может изменить часть своего кода.
- Поддержка загрузки основной программы с помощью защищённой от перезаписи подпрограммы (bootloader). Код основной программы обычно принимается через один из портов микроконтроллера с использованием одного из стандартных протоколов.
- Ряд режимов пониженного энергопотребления.
Примечание: не все периферийные устройства могут быть включены программно. Некоторые из них предварительно должны быть активированы битами в регистрах Fuses, которые могут быть изменены только программатором.