Устройство и принцип действия электродвигателя постоянного тока
Машины, осуществляющие свою работу при присоединении к ним тока, не меняющего свою полярность, называют машинами постоянного тока. Они превращают электричество в механическую энергию.
Принцип работы электродвигателя всякой конструкции опирается на использование закона электромагнитной индукции и явления самоиндукции.
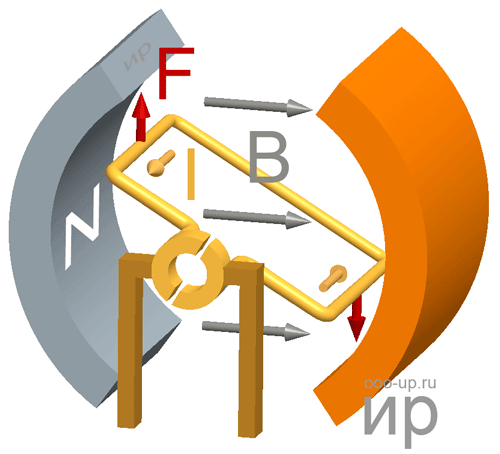
Информация. В замкнутом контуре или рамке, помещённой в магнитное поле (МП) постоянных магнитов, возникает электродвижущая сила (ЭДС). Это происходит в результате пронизывания рамки электромагнитными линиями МП, если крутить магниты или саму рамку.
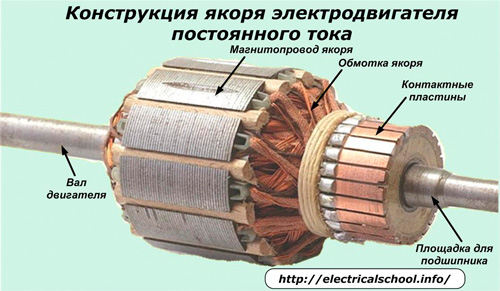
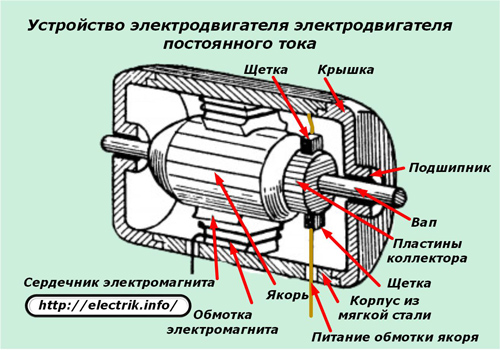
В основе работы электродвигателя лежит образование крутящего момента при подаче напряжения на катушки якоря. Его ещё называют синхронным двигателем постоянного тока (ДПТ). Устройство простейшей машины вмещает в себя:
- статор, с расположенными на нём постоянными магнитами;
- двухзубцовый якорь, имеющий одну обмотку;
- коллектор;
- щёточный узел, в который входят две щётки и два ламеля (пластины).
Внимание! У такого двигателя две «мёртвые точки» (крайние положения). В этих точках невозможно самозапускание, а крутящий момент такого ДПТ неравномерен
Статор, он же – индуктор, располагает в основном двумя парами основных полюсов. В случае необходимости на нём устанавливают добавочные. Это улучшает переключение на коллекторе якоря.
Ротор, он же – якорь, должен иметь как минимум три зубца, чтобы двигатель мог сам запускаться из каждой точки. При этом в зону подключения стабильно попадает один из зубцов.
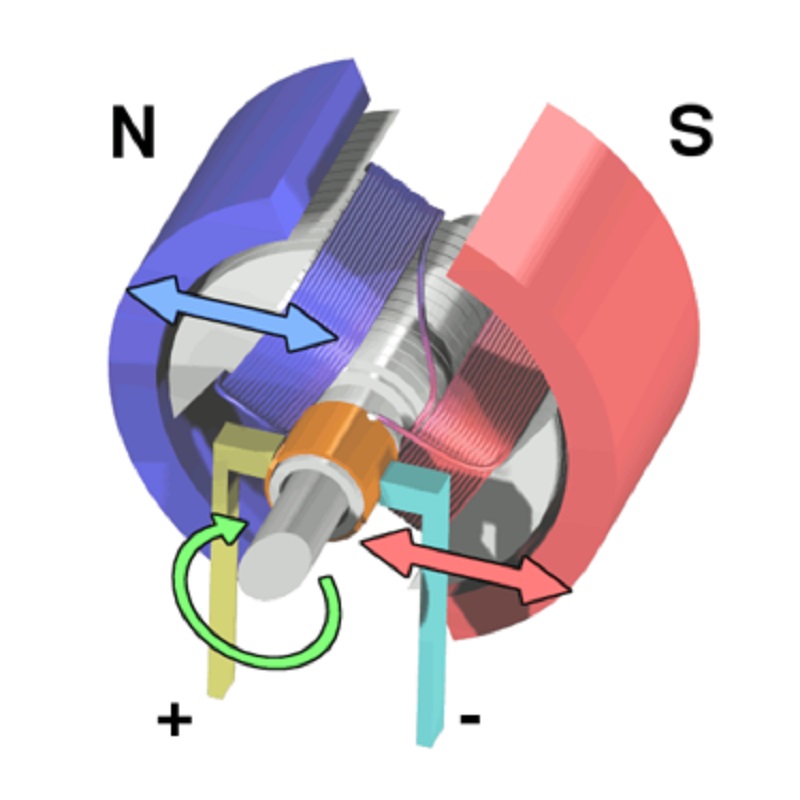 Схема простого коллекторного ДПТ
Схема простого коллекторного ДПТ
На щёточно-коллекторный узел выведены все катушки якоря, какие есть. Коллектор является кольцом из изолированных ламелей (пластин), размещённых по длине оси ротора. По ним скользят щётки и подают или снимают напряжение.
 Устройство коллектора
Устройство коллектора
Важно! Двигатель вращается благодаря силе Ампера, которая действует на проводник, находящийся в МП, когда в нём протекает электрический ток. При этом источник тока должен поддерживать его неизменное значение
Все ДПТ обладают свойствами саморегулирования, поддерживая вращающий момент равным моменту сопротивления на валу. Это происходит автоматически, и частота вращения постоянна.
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
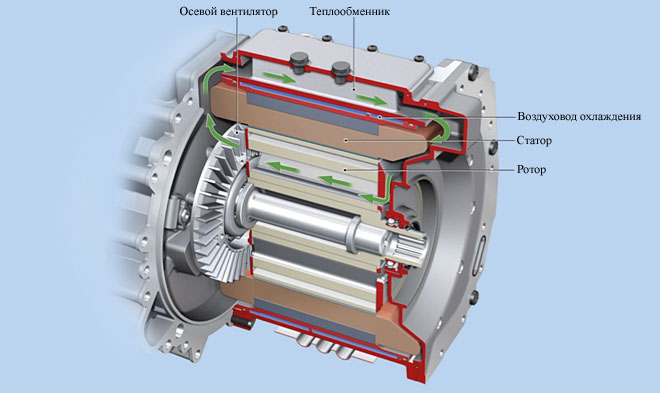
Устройство асинхронного двигателя
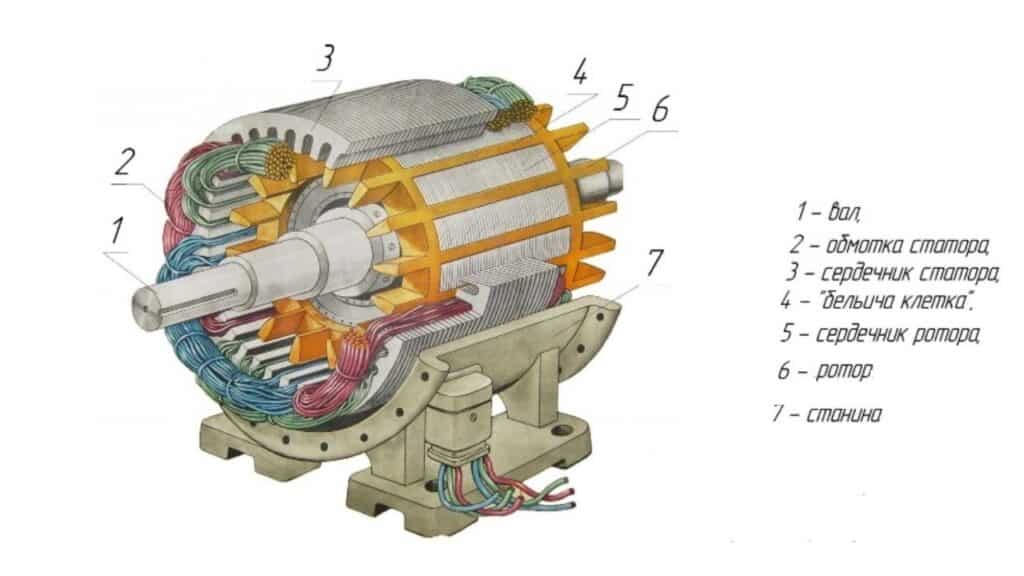
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.





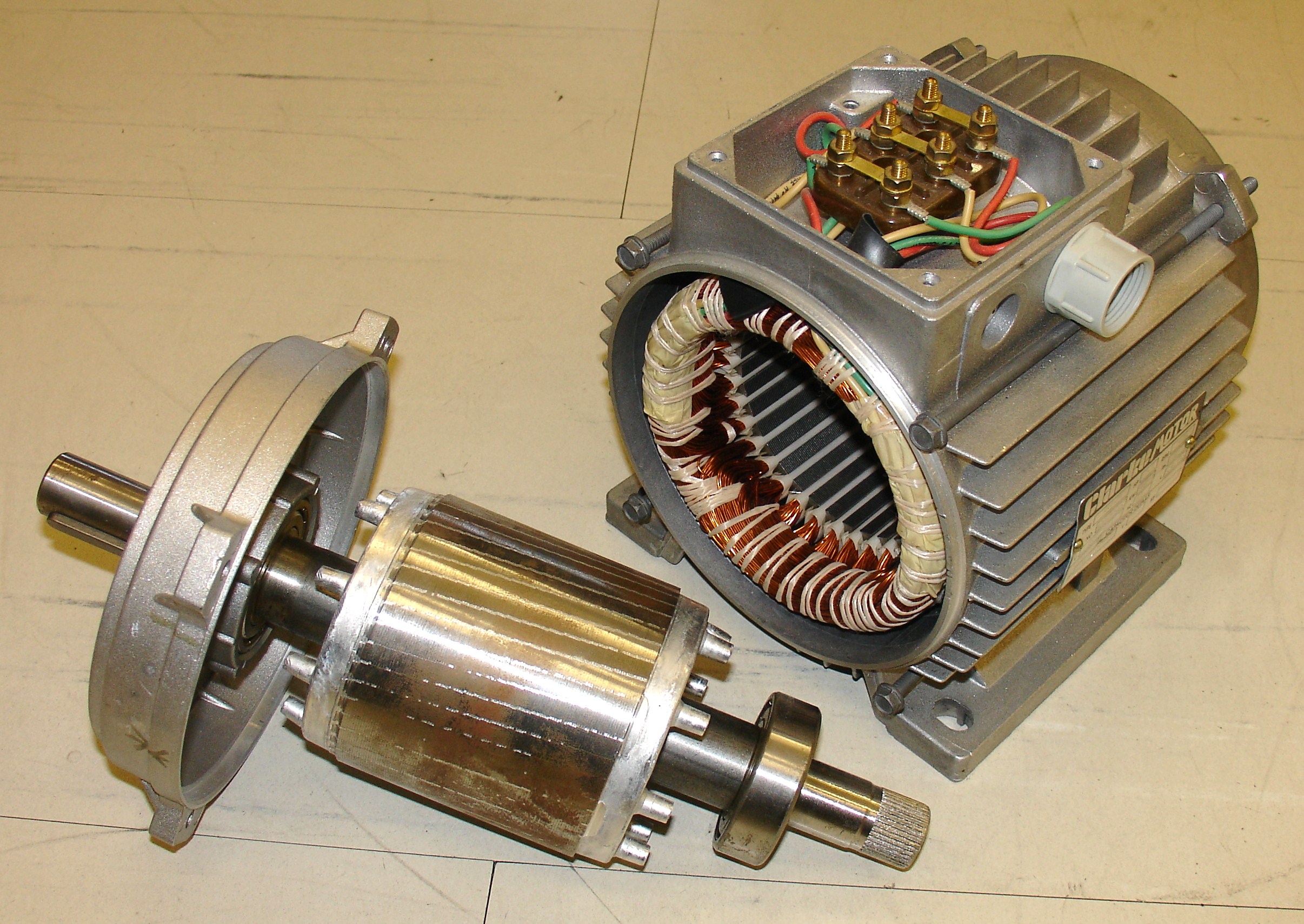

Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
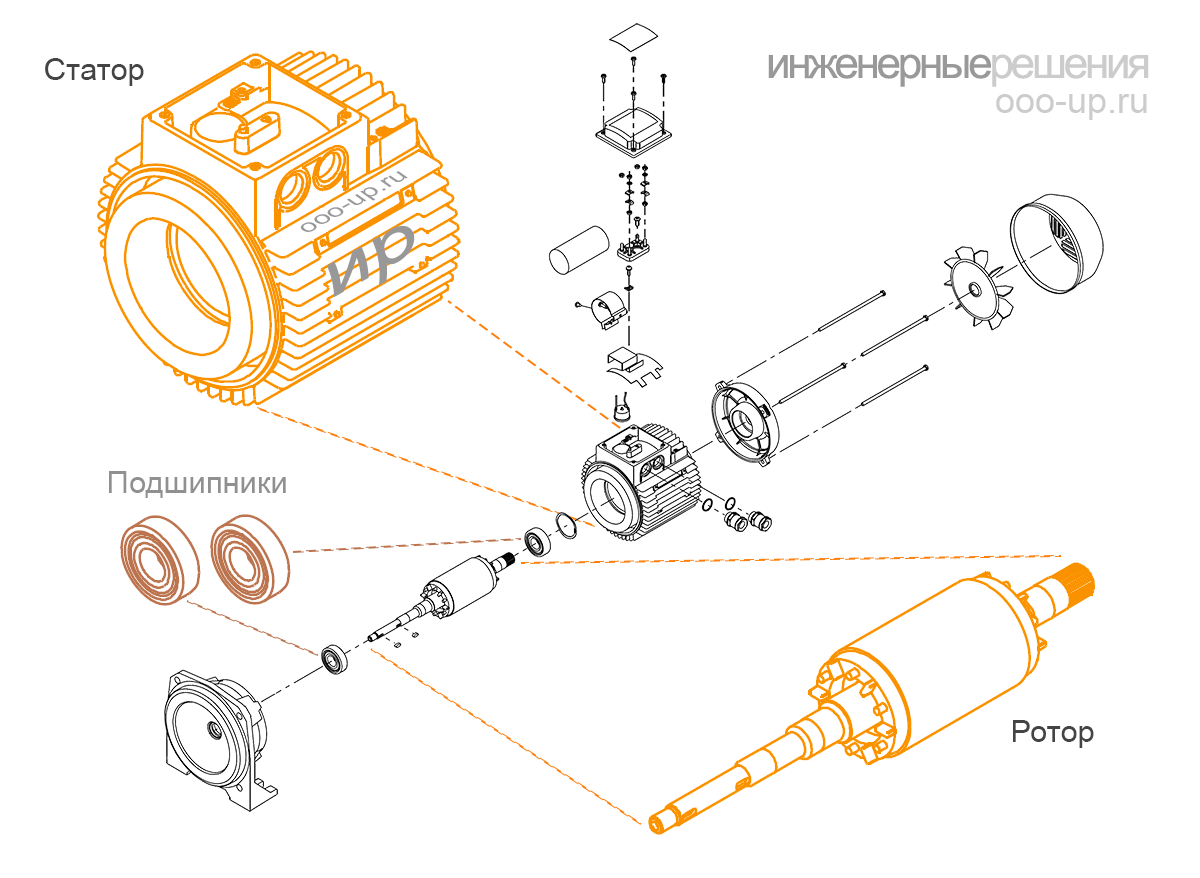
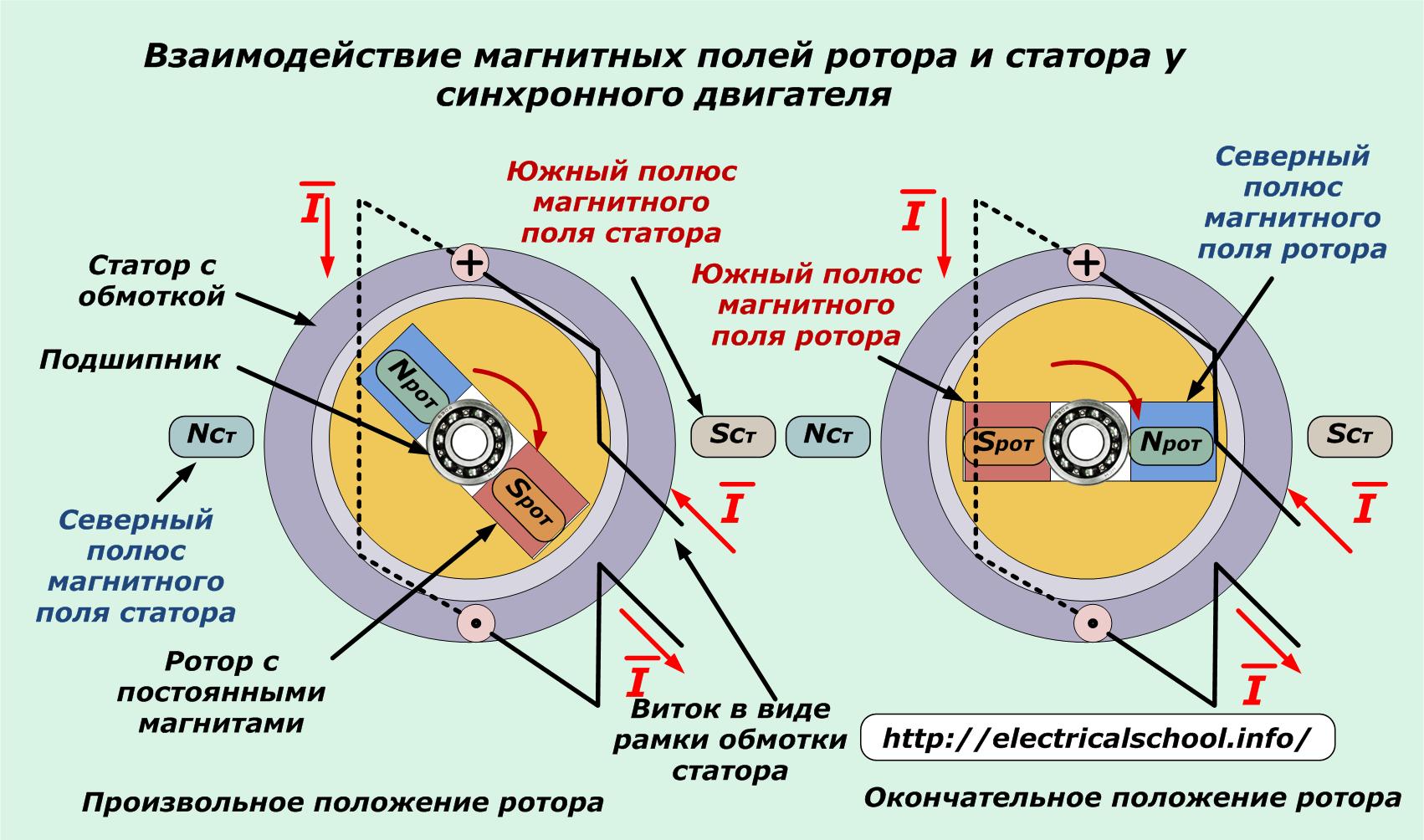
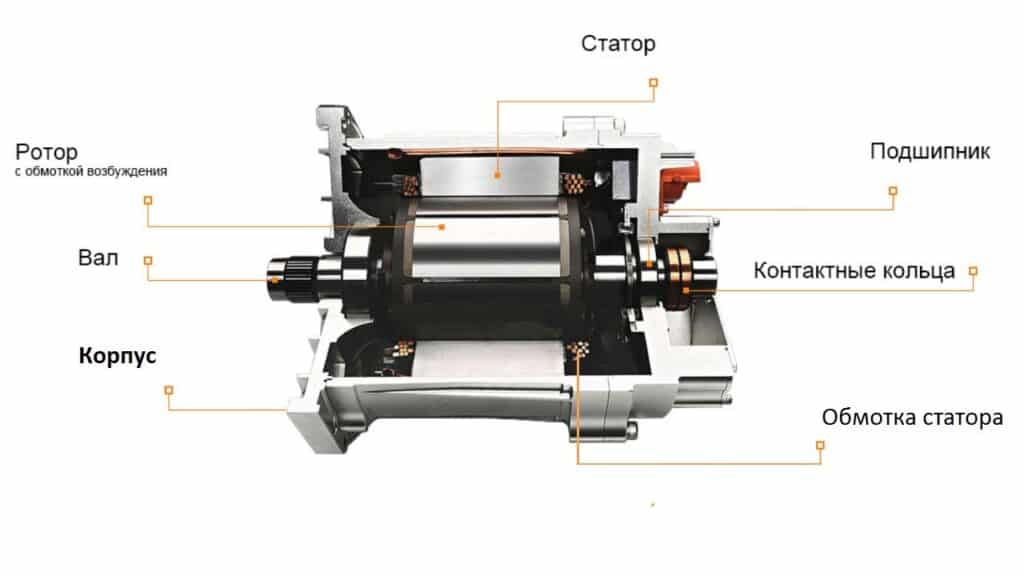
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Схема подключения электродвигателя 380 на 220 вольт с конденсатором
Есть еще один вариант подключения электродвигателя мощность в 380 Вольт, который приходит в движение без нагрузки. Для этого также необходим конденсатор в рабочем состоянии.
Один конец подключается к нулю, а второй — к выходу треугольника с порядковым номером три. Чтобы изменить направление вращения электромотора, стоит подключить его к фазе, а не к нулю.
Схема подключения электродвигателя 220 вольт через конденсаторы
В случае когда мощность двигателя более 1,5 Киловатта или он при старте работает сразу с нагрузкой, вместе с рабочим конденсатором необходимо параллельно установить и пусковой. Он служит увеличению пускового момента и включается всего на несколько секунд во время старта. Для удобства он подключается с кнопкой, а все устройство — от электропитания через тумблер или кнопку с двумя позициями, которая имеет два фиксированных положения. Для того чтобы запустить такой электромотор, необходимо все подключить через кнопку (тумблер) и держать кнопку старта, пока он не запустится. Когда запустился – просто отпускаем кнопку и пружина размыкает контакты, отключая стартер
Специфика заключается в том, что асинхронные двигатели изначально предназначаются для подключения к сети с тремя фазами в 380 В или 220 В.
Важно! Для того чтобы подключить однофазный электромотор в однофазную сеть, необходимо ознакомиться с данными мотора на бирке и знать следующее:
Р = 1,73 * 220 В * 2,0 * 0,67 = 510 (Вт) расчет для 220 В
Р = 1,73 * 380 * 1,16 * 0,67 =510,9 (Вт) расчет для 380 В
По формуле становится понятно, что электрическая мощность превосходит механическую. Это необходимый запас для компенсации потерь мощности при старте — создании вращающегося момента магнитного поля.
Существуют два типа обмотки — звездой и треугольником. По информации на бирке мотора можно определить какая система в нем использована.
Подключение асинхронного двигателя
Трехфазный переменный ток
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
Трехфазный ток (разница фаз 120°)
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).



Фазное напряжение — разница потенциалов между началом и концом одной фазы
Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль)
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
|---|---|---|
| Uл, Uф — линейное и фазовое напряжение, В, | ||
| Iл, Iф — линейный и фазовый ток, А, | ||
| S — полная мощность, Вт | ||
| P — активная мощность, Вт |
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А
Полная потребляемая мощность:
S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
Обозначение выводов обмоток статора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W |
Обозначение выводов обмоток статора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | ||
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 |
Классификация электродвигателей
| Вращающийся электродвигатель | ||||
|---|---|---|---|---|
| Само коммутируемый | Внешне коммутируемый | |||
| С механической коммутацией (коллекторный) | С электронной коммутацией1 (вентильный2, 3) | Асинхронный электродвигатель | Синхронный электродвигатель | |
| Переменного тока | Постоянного тока | Переменного тока4 | Переменного тока | |
|
|
|
|
|
| Простая электроника | Выпрямители,транзисторы | Более сложнаяэлектроника | Сложная электроника (ЧП) |
Примечание:
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, — датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря .
- Вентильный электродвигатель постоянного тока — электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля .
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
Аббревиатура:
- КДПТ — коллекторный двигатель постоянного тока
- БДПТ — бесколлекторный двигатель постоянного тока
- ЭП — электрический преобразователь
- ДПР — датчик положения ротора
- ВРД — вентильный реактивный двигатель
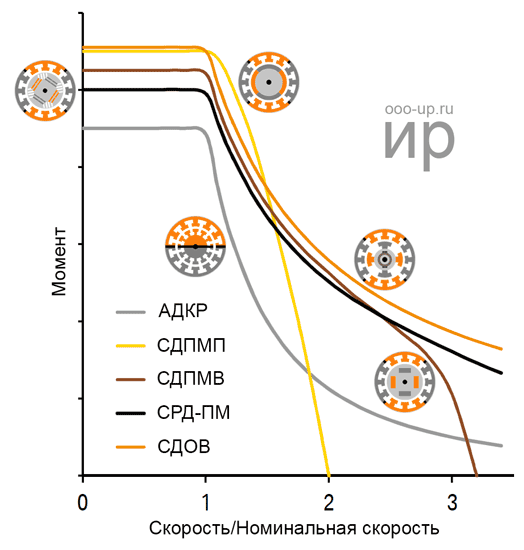
- АДКР —
- АДФР —
- СДОВ — синхронный двигатель с обмоткой возбуждения
- СДПМ — синхронный двигатель с постоянными магнитами
- СДПМП —
- СДПМВ —
- СРД — синхронный реактивный двигатель
- ПМ — постоянные магниты
- ЧП — частотный преобразователь
Асинхронные электродвигатели
Асинхронные электрические машины смело можно назвать костяком современной промышленности. Благодаря своей простоте, относительно низкой стоимости, минимальным затратам на обслуживание, а также возможности работать напрямую от промышленных сетей переменного тока, они прочно въелись в современные производственные процессы.
Сегодня существует множество различных преобразователей частоты с самыми различными алгоритмами управления, которые позволяют регулировать скорость и момент асинхронной машины в большом диапазоне с хорошей точностью. Все эти свойства позволили асинхронной машине значительно потеснить с рынка традиционные коллекторные двигатели. Вот почему регулируемые асинхронные электродвигатели (АД) легко встретить в самых различных устройствах и механизмах, таких как тяговый асинхронный электропривод, электроприводы стиральных машин, вентиляторов, компрессоров, воздуходувок, кранов, лифтов и многом другом электрооборудовании.






АД создает вращающий момент за счет взаимодействия тока статора с индуцированным током ротора. Но токи ротора нагревают его, что приводит к нагреванию подшипников и снижению их срока службы. Замена традиционной алюминиевой обмотки на медную не устраняет проблему, а приводит к удорожанию электрической машины и может накладывать ограничения на прямой ее пуск.
Статор асинхронной машины имеет довольно большую постоянную времени, что негативно сказывается на реагировании системы управления при изменении скорости или нагрузки. К сожалению, потери связанные с намагничиванием не зависят от нагрузки машины, что снижает КПД АД при работе с малыми нагрузками. Автоматическое уменьшение потока статора возможно использовать для решения данной проблемы — для этого необходим быстрый отклик системы управления на изменения нагрузки, но как показывает практика, такая коррекция не существенно увеличивает КПД.
На скоростях превышающих номинальную поле статора ослабевает из-за ограниченного напряжения питания. Вращающий момент начинает падать, так как для его поддержания будет требоваться больший ток ротора. Следовательно, управляемые АД ограничиваются диапазоном скорости для поддержания постоянной мощности примерно 2:1.
Механизмы, которые требуют более широкого диапазона регулирования, такие как: станки с ЧПУ, тяговый электропривод, могут снабжаться асинхронными электродвигателями специального исполнения, где для увеличения диапазона регулирования могут уменьшать количество витков обмотки, снижая при этом значения крутящего момента на низких скоростях. Также возможен вариант с использованием более высоких токов статора, что требует установки более дорогих и менее эффективных инверторов.
Немаловажным фактором при работе АД является качество питающего напряжения, ведь максимальный КПД электродвигатель имеет при синусоидальной форме питающего напряжения. В реальности преобразователь частоты обеспечивает импульсное напряжение и ток, похожий на синусоидальный. Проектировщикам стоит иметь ввиду, что КПД системы ПЧ-АД будет меньше, чем сумма КПД преобразователя и двигателя в отдельности. Улучшения качества выходного тока и напряжения повышают увеличением несущей частоты преобразователя, это приводит к снижению потерь в двигателе, но при этом возрастают потери в самом инверторе. Одним из популярных решений, особенно для промышленных мощных электроприводов, является установка фильтров между преобразователем частоты и асинхронной машиной. Однако это приводит к увеличению стоимости, габаритов установки, а также к дополнительным потерям мощности.
Еще одним недостатком асинхронных машин переменного тока является то, что их обмотки распределены на протяжении многих пазов в сердечнике статора. Это приводит к появлению длинных концевых поворотов, которые увеличивают габариты и потери энергии в машине. Эти вопросы исключены в стандартах IE4 или классах IE4. В настоящее время европейский стандарт (IEC60034) специально исключает любые двигатели, требующие электронного управления.
Принцип действия современных электродвигателей
Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется асинхронный двигатель переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное.
Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.
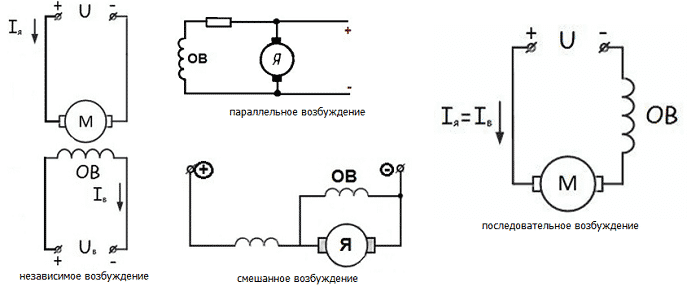
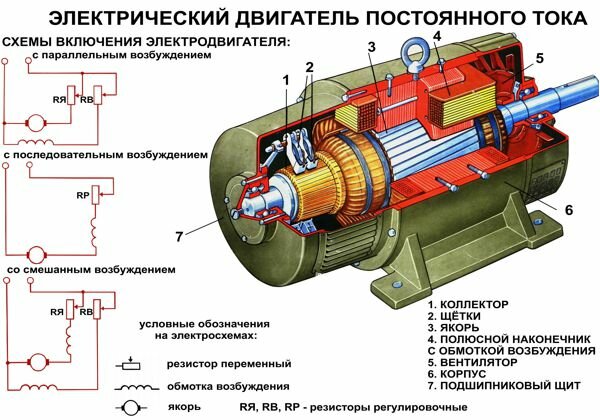
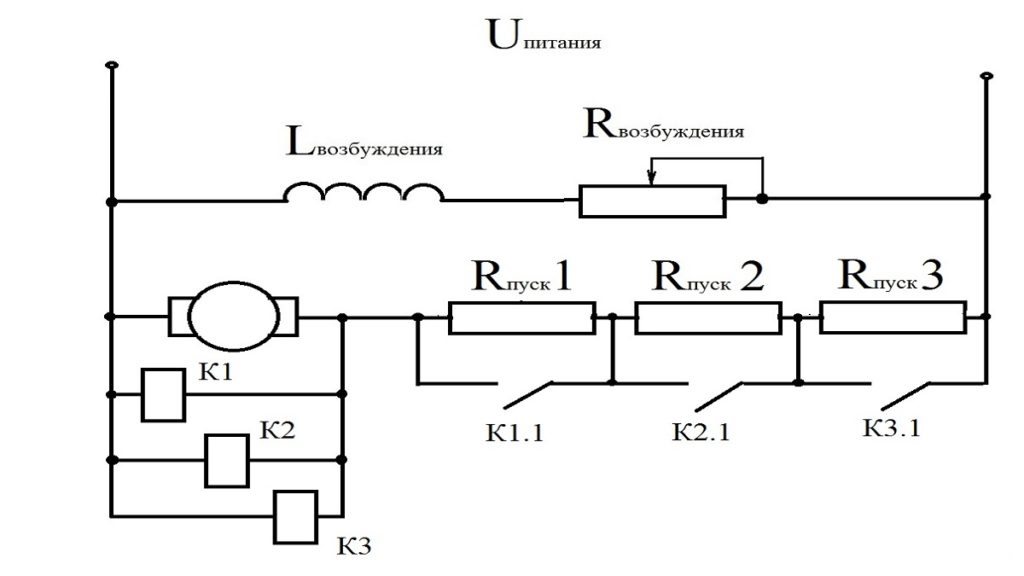
Что касается электрической схемы включения двигателя, то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше.
На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления.
Свежие записи:
|
|
Принцип работы электродвигателей. Основные понятия.
Магнетизм
Наиболее характерное магнитное явление — притяжение магнитом кусков железа — известно со времен глубокой древности
Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые — отталкиваются друг от друга
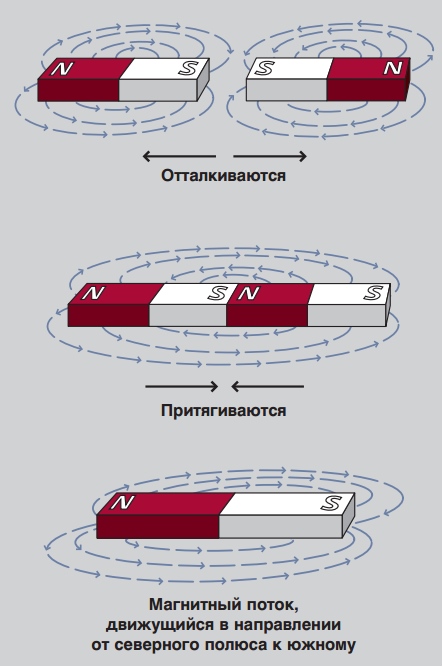
Магнитное поле
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.





Электромагнетизм
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
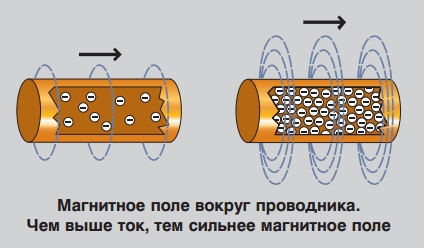
Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.

Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Ротор:
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Статор:
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.

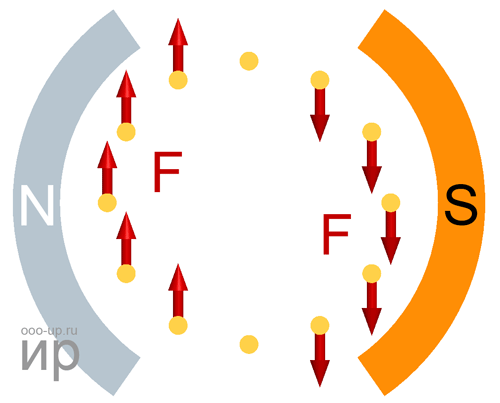
Вращение под действием магнитного поля
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса — притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.

Однофазные асинхронные электродвигатели
Устройство и принцип действия
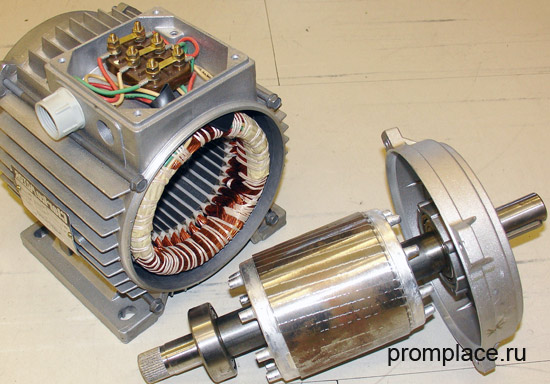
Мощность такого однофазного двигателя 220В может в зависимости от конструкции находиться в пределах от 5 Вт до 10 кВт. Его ротор – это обычно короткозамкнутая обмотка («беличья клетка») – медные или алюминиевые стержни, замкнутые с торцов.
Такой однофазный двигатель, как правило, имеет две смещенные на 90° друг относительно друга обмотки. Рабочая (главная) при этом занимает большую часть пазов статора, а пусковая (вспомогательная) – оставшуюся. И однофазным его называют потому, что у него лишь одна рабочая обмотка.
Переменный ток, протекающий по главной обмотке, создает периодически меняющееся магнитное поле. Его можно считать состоящим из двух круговых с одинаковой амплитудой, вращающихся навстречу друг другу.
По закону электромагнитной индукции в замкнутых витках ротора меняющийся магнитный поток создает индукционный ток, взаимодействующий с порождающим его полем. Если ротор неподвижен, моменты действующих на него сил одинаковы, вследствие чего ротор остается неподвижным.









Если же ротор начать вращать, то равенство моментов этих сил нарушится, поскольку скольжение его витков относительно вращающихся магнитных полей станет разным. Как следствие – сила Ампера, действующая на витки ротора со стороны прямого магнитного поля, будет значительно больше, чем со стороны обратного.
Индукционный ток в витках ротора может возникать лишь при пересечении ими силовых линий магнитного поля. А для этого они должны вращаться со скоростью, чуть меньшей, чем частота вращения поля (при одной паре полюсов – 3000 об/мин). Отсюда и название, которое получили такие электродвигатели, асинхронные.
При увеличении механической нагрузки скорость вращения уменьшается, возрастает величина индукционного тока в витках ротора. Как следствие – возрастают и механическая мощность двигателя, и мощность потребляемого им переменного тока.
Схема запуска и подключения
Понятно, что раскручивать вручную ротор при каждом запуске электродвигателя неудобно. Для создания первоначального пускового момента и используется пусковая обмотка. Поскольку она составляет с рабочей обмоткой прямой угол, для создания вращающегося магнитного поля ток в ней должен быть сдвинут по фазе относительно тока в рабочей обмотке тоже на 90°.
Добиться этого можно включением в цепь ее питания фазосмещающего элемента. Резистор или дроссель обеспечить фазовый сдвиг в 90° не могут, поэтому в большинстве ситуаций логично использование конденсатора в качестве фазосмещающего элемента. В этом случае однофазный электродвигатель обладает наилучшими пусковыми свойствами.
Когда фазовращающий элемент является конденсатором, однофазные электродвигатели конструктивно могут быть такими:
- с пусковым конденсатором (рис. а);
- с пусковым и рабочим (рис. б);
- только с рабочим конденсатором (рис. в).
Первый (наиболее распространенный) вариант предусматривает подключение пусковой обмотки с конденсатором ненадолго на время пуска, после чего они отключаются. Реализовать его можно с помощью реле времени, а то и просто за счет замыкания цепи во время нажатия пусковой кнопки. Эта схема запуска характеризуется сравнительно небольшим пусковым током, но в номинальном режиме характеристики невысоки. Причина в том, что поле статора является эллиптическим (в направлении полюсов оно сильнее, чем в перпендикулярном).
Схема с рабочим, постоянно включенным конденсатором лучше работает в номинальном режиме, но имеет посредственные пусковые характеристики. Вариант с пусковым и рабочим конденсатором является промежуточным между двумя описанными выше. Расчет значений их емкостей сравнительно прост: у рабочего 0,75 мкФ на 1 кВт мощности, у пускового – в 2,5 раза больше.