2.3. Свободные колебания. Математический маятник window.top.document.title = «2.3. Свободные колебания. Математический маятник»;
Математическим маятником называют тело небольших размеров, подвешенное на тонкой нерастяжимой нити, масса которой пренебрежимо мала по сравнению с массой тела. В положении равновесия, когда маятник висит по отвесу, сила тяжести уравновешивается силой натяжения нити При отклонении маятника из положения равновесия на некоторый угол φ появляется касательная составляющая силы тяжести Fτ = –mg sin φ (рис. 2.3.1). Знак «минус» в этой формуле означает, что касательная составляющая направлена в сторону, противоположную отклонению маятника.
| Рисунок 2.3.1.Математический маятник. φ – угловое отклонение маятника от положения равновесия, x = lφ – смещение маятника по дуге |
Если обозначить через x линейное смещение маятника от положения равновесия по дуге окружности радиуса l, то его угловое смещение будет равно φ = x / l. Второй закон Ньютона, записанный для проекций векторов ускорения и силы на направление касательной, дает:
Это соотношение показывает, что математический маятник представляет собой сложную нелинейную систему, так как сила, стремящаяся вернуть маятник в положение равновесия, пропорциональна не смещению x, а
Только в случае малых колебаний, когда приближенно можно заменить на математический маятник является гармоническим осциллятором, т. е. системой, способной совершать гармонические колебания. Практически такое приближение справедливо для углов порядка 15–20°; при этом величина отличается от не более чем на 2 %. Колебания маятника при больших амплитудах не являются гармоническими.
Для малых колебаний математического маятника второй закон Ньютона записывается в виде
Таким образом, тангенциальное ускорение aτ маятника пропорционально его смещению x, взятому с обратным знаком. Это как раз то условие, при котором система является гармоническим осциллятором. По общему правилу для всех систем, способных совершать свободные гармонические колебания, модуль коэффициента пропорциональности между ускорением и смещением из положения равновесия равен квадрату круговой частоты:
Эта формула выражает собственную частоту малых колебаний математического маятника.
Следовательно,
|
Модель. Математический маятник |
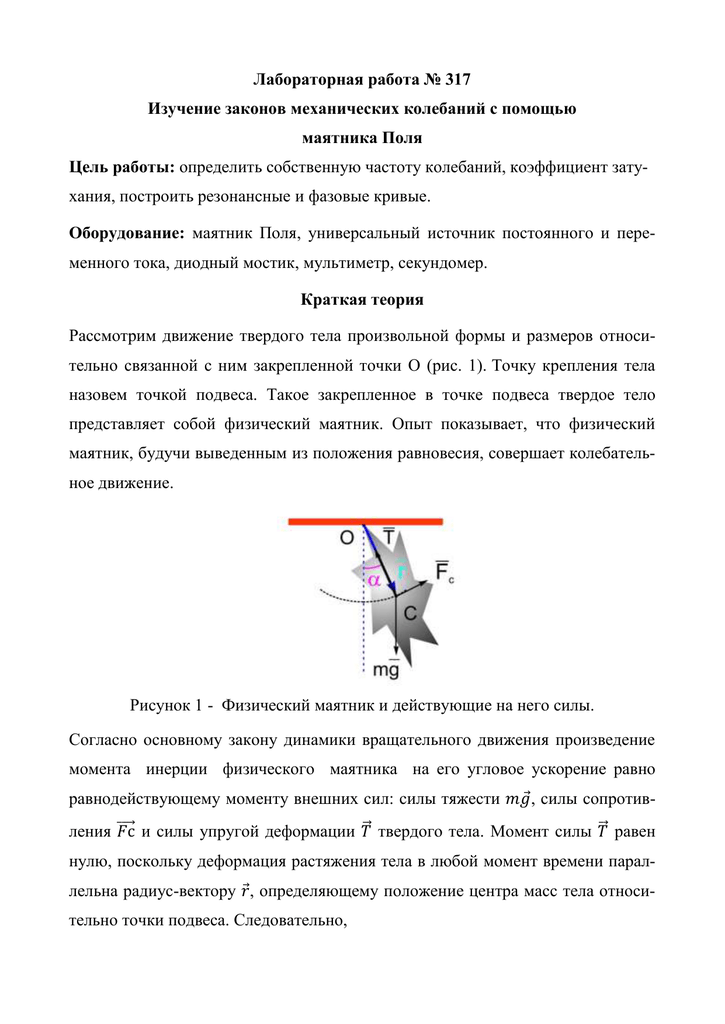
Любое тело, насаженное на горизонтальную ось вращения, способно совершать в поле тяготения свободные колебания и, следовательно, также является маятником. Такой маятник принято называть физическим (рис. 2.3.2). Он отличается от математического только распределением масс. В положении устойчивого равновесия центр масс C физического маятника находится ниже оси вращения О на вертикали, проходящей через ось. При отклонении маятника на угол φ возникает момент силы тяжести, стремящийся возвратить маятник в положение равновесия:
Здесь d – расстояние между осью вращения и центром масс C.
| Рисунок 2.3.2.Физический маятник |
Знак «минус» в этой формуле, как обычно, означает, что момент сил стремится повернуть маятник в направлении, противоположном его отклонению из положения равновесия. Как и в случае математического маятника, возвращающий момент M пропорционален sin φ. Это означает, что только при малых углах φ, когда sin φ ≈ φ, физический маятник способен совершать свободные гармонические колебания. В случае малых колебаний
см. §1.23
εIO
Здесь ω – собственная частота малых колебаний физического маятника.
Следовательно,
Более строгий вывод формул для ω и T можно сделать, если принять во внимание математическую связь между угловым ускорением и угловым смещением: угловое ускорение ε есть вторая производная углового смещения φ по времени:
Поэтому уравнение, выражающее второй закон Ньютона для физического маятника, можно записать в виде
Это уравнение свободных гармонических колебаний (). Коэффициент в этом уравнении имеет смысл квадрата круговой частоты свободных гармонических колебаний физического маятника.
По теореме о параллельном переносе оси вращения (теорема Штейнера) момент инерции I можно выразить через момент инерции IC относительно оси, проходящей через центр масс C маятника и параллельной оси вращения:
Окончательно для круговой частоты ω свободных колебаний физического маятника получается выражение:
Циклическая частота
Основная статья: Угловая частота
В теории электромагнетизма, теоретической физике, а также в некоторых прикладных электрорадиотехнических расчётах удобно использовать дополнительную величину — циклическую (круговую, радиальную, угловую) частоту (обычно обозначается ω). Углова́я частота́ (синонимы: радиальная частота, циклическая частота, круговая частота) — скалярная физическая величина. В случае вращательного движения угловая частота равна модулю вектора угловой скорости. В системах СИ и СГС угловая частота выражается в радианах в секунду, её размерность обратна размерности времени (радианы безразмерны).
Угловая частота в радианах в секунду выражается через частоту ν (выражаемую в оборотах в секунду или колебаниях в секунду), как ω = 2πν.
В случае использования в качестве единицы угловой частоты градусов в секунду связь с обычной частотой будет следующей: ω = 360°ν.
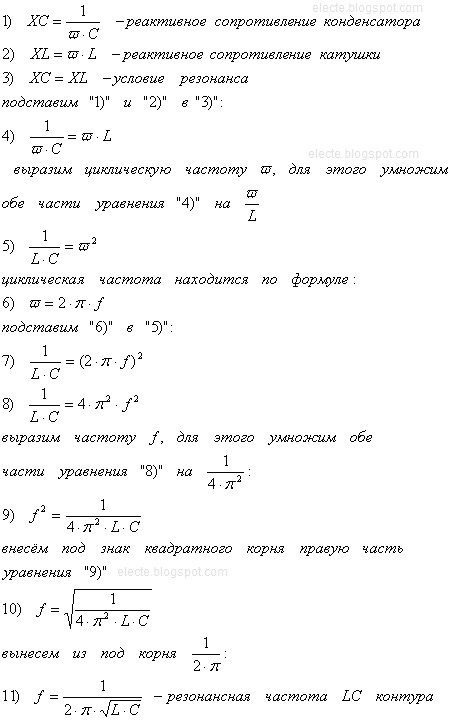
Численно циклическая частота равна числу циклов (колебаний, оборотов) за 2π секунд. Введение циклической частоты (в её основной размерности — радианах в секунду) позволяет упростить многие формулы в теоретической физике и электронике. Так, резонансная циклическая частота колебательного LC-контура равна ωLC=1LC,{\displaystyle \omega _{LC}=1/{\sqrt {LC}},} тогда как обычная резонансная частота νLC=1(2πLC).{\displaystyle \nu _{LC}=1/(2\pi {\sqrt {LC}}).} В то же время ряд других формул усложняется. Решающим соображением в пользу циклической частоты стало то, что множители 2π{\displaystyle 2\pi } и 12π{\displaystyle 1/2\pi }, появляющиеся во многих формулах при использовании радианов для измерения углов и фаз, исчезают при введении циклической частоты.
В механике при рассмотрении вращательного движения аналогом циклической частоты служит угловая скорость.
Подключение к цепи индуктивной катушки
Включение в ёмкостную цепь катушки индуктивности сразу превращает её в КК. В зависимости от схемы подключения, различают два вида КК 1 класса: параллельный и последовательный.
Параллельный КК
В данной схеме конденсатор С соединён с катушкой L параллельно. Если заряженный конденсатор присоединить к катушке, то энергия, запасённая в нём, передастся ей. Через индуктивную катушку L потечёт ток, вызывая электродвижущую силу (ЭДС).





ЭДС самоиндукции L будет направлена на снижение тока в параллельной цепи. Ток, созданный этой ЭДС, и ток разряда ёмкости сначала одинаковы, а их суммарное значение равно нулю. Конденсатор передаст свою энергию Ec в катушку и полностью разрядится. Индуктивность, получив максимальную магнитную энергию EL, начнёт заряжать ёмкость напряжением уже другой полярности. Когда вся энергия из индуктивности перейдёт в ёмкость, конденсатор будет полностью заряжен. В цепи появляются колебания, такой контур называется колебательным.
К сведению. Если бы в такой цепи отсутствовали потери, то такие колебания никогда не стали затухать. На практике, продолжительность процесса зависит от потери энергии. Чем больше потери, тем меньше длительность колебаний.
Параллельное соединение C и L вызывает резонанс токов. Это значит, что токи, проходящие через C и L, выше по значению, чем ток через сам контур, в конкретное число раз. Это число носит название добротности Q. Оба тока (емкостной и индуктивный) остаются внутри цепи, потому что они находятся в противофазе, и происходит их обоюдная компенсация.
Последовательный КК
В этой схеме соединены последовательно друг с другом катушка и конденсатор.
В такой схеме происходит resonance напряжений, R контура устремляется к нулю в случае образования резонансной частоты (fрез). Это позволяет использовать подобную систему резонанса в качестве фильтра.
Пример работы: звук
Всё выше написанное может быть довольно сложным для понимания, поскольку нами использовался сухой язык физики. Чтобы осознать приведённую информацию, можно привести пример. В нём всё будет детально расписано, основываясь на анализе случаев из современной жизни. Для этого рассмотрим самый известный пример колебаний – звук. Его свойства, а также особенности осуществления механических упругих колебаний в среде, находятся в прямой зависимости от частоты.
Человеческие органы слуха могут улавливать колебания, которые находятся в рамках от 20 Гц до 20 кГц. Причём с возрастом верхняя граница будет постепенно снижаться. Если частота колебаний звука упадёт ниже показателя в 20 Гц (что соответствует ми субконтроктавы), то будет создаваться инфразвук. Этот тип, который в большинстве случаев не слышен нам, люди всё же могут ощущать осязательно. При превышении границы в 20 килогерц генерируются колебания, которые называются ультразвуком. Если частота превысит 1 ГГц, то в этом случае мы будем иметь дело с гиперзвуком. Если рассматривать такой музыкальный инструмент, как фортепиано, то он может создавать колебания в диапазоне от 27,5 Гц до 4186 Гц. При этом следует учитывать, что музыкальный звук не состоит только из основной частоты – к нему ещё примешиваются обертоны, гармоники. Это всё вместе определяет тембр.
Циклическая частота гармонических колебаний
Колебательные движения играют важную роль в самых разных вопросах физики. Рассмотрим колебания материальной точки. При колебаниях материальная точка через равные промежутки времени проходит через одно и то же положение при движении в одном направлении.
Самым важным колебательными движениями являются гармонические колебания. Сущность таких колебаний проще всего рассмотреть на следующей кинематической модели. Путь точка M со скоростью ($v$) постоянной по величине движется по окружности радиуса A. При этом ее угловая скорость равна $_0=const$ (рис.1).
Проекция точки на диаметр окружности, например на ось X, совершает колебания от $N_1$ до $N_2 $и обратно (точка N). Такое колебание N ,будет называться гармоническим. Для его описания следует записать координату точки N, как функцию от времени ($t$). Пусть при $t=0$ радиус OM образует с осью X угол $_0$. Через некоторый промежуток времени этот угол получит приращение $_0t$ и станет равен $_0t+_0$, тогда:
Выражение (1) является аналитической формой записи гармонического колебания точки N по диаметру $N_1N_2$.
Рассмотрим формулу (1). Параметр $A$ – максимальное отклонение точки, совершающей колебания, от положения равновесия (точки О – центра окружности), амплитуда колебаний.
Величина $_0$ – циклическая частота колебаний. $varphi =(_0t+_0$) – фаза колебаний; $_0$ – начальная фаза колебаний. Циклическую частоту гармонических колебаний определим как частную производную от фазы колебаний по времени:
Формулы циклической частоты для гармонических осцилляторов
Классическими примерами гармонических осцилляторов в механике являются:
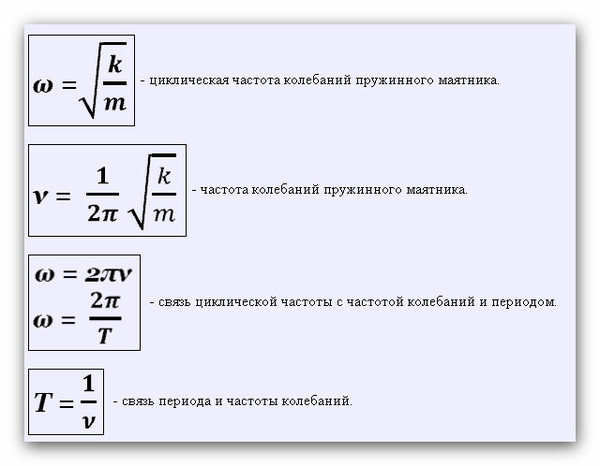
- груз на упругой пружине (пружинный маятник);
- математический маятник;
- физический маятник (твердое тело, выполняющее колебания (качания) относительно неподвижной горизонтальной оси, которая проходит через точку, не совпадающую с его центром масс);
- электрический $LC$ контур.
Допустим, что осцилляторы совершают свободные (без действия внешних сил) колебания при отсутствии трения.
Груз на пружине выполняет колебания с циклической частотой равной:
$\omega_0=\sqrt{\frac{k}{m}}(7),$
где $k$ — коэффициент упругости пружины; $m$- масса тела, подвешенного к пружине.
Круговая частота малых колебаний физического маятника равна:
$\omega_0=\sqrt{\frac{mga}{I}}(8),$
где $m$ — масса маятника; $a$ — расстояние от центра масс, до точки подвеса маятника; $I$ — момент инерции маятника.
Математический маятник — это частный случай физического маятника. У этого маятника массу считают сосредоточенной в одной точке — центре его центре масс. Чаще всего в качестве математического маятника рассматривают шарик, который выполняет колебания на длинной нити.
Циклическая частота колебаний математического маятника равна:
$\omega_0=\sqrt{\frac{g}{l}}(9),$
где $l$ — длина нити.
Классическим примером осциллятора, который может выполнять свободные незатухающие гармонические электромагнитные колебания является идеальный электрический контур, состоящий из конденсатора и катушки индуктивности.
Циклическая частота данных колебаний определяется выражением:
$\omega_0=\frac{1}{\sqrt{LC}}(10)$,
где $C$ — емкость конденсатора; $L$ — индуктивность катушки.
Из приведенных выше формул мы видим, что частота свободных колебаний без учета трения зависит только от свойств самих осцилляторов.
Амплитуда резонанса
В КК при подаче переменного напряжения от внешнего источника наблюдаются два вида резонанса и резкое увеличение двух видов амплитуды: амплитуды тока и амплитуды напряжения.
Амплитуда тока
Амплитуда тока резко возрастает при резонансе напряжений в последовательном контуре (последовательный резонанс). Источник переменной ЭДС включён в цепь, где нагрузкой служат последовательно включённые элементы L и С.



В этом случае в цепь входят сопротивления: активное r и реактивное x, равное:
Так как для внутренних колебаний xL и xC равны, то для тока, поступающего от генератора, при резонансе (когда частоты совпадают) эти значения тоже одинаковы. Поэтому x = 0. В итоге полное сопротивление цепи будет состоять только из небольшого активного сопротивления. Ток при этом получается максимальным.
Амплитуда напряжения
Резонанс токов (параллельный резонанс) является условием резкого возрастания амплитуды напряжения. Источник ЭДС подключается вне контура и нагружен параллельно соединёнными элементами L и С. В этом случае на эффект резонанса влияет внутреннее сопротивление генератора. Амплитуда напряжения на контуре максимальна при малом отличии напряжения контура от напряжения генератора. Это возможно при малом Ri.
Внимание! Изменение частоты генератора меняет ток, а амплитуда напряжения на контуре не отстаёт по величине от напряжения на генераторе. Если, U = Е – I*Ri, где Е – ЭДС, I – ток, то при малом Ri U = Е
Формула для определения расчётной резонансной частоты для разных колебательных систем различается по входящим в неё параметрам. Несмотря на все различия, суть остаётся неизменной: эффект резонанса наступает тогда, когда частота внутренних колебаний системы и внешних воздействий становятся равны друг другу.
Звук
Звук – это колебания упругой среды, воспринимаемые органом слуха.
Условия, необходимые для возникновения и ощущения звука:
- наличие источника звука;
- наличие упругой среды между источником и приемником звука;
- наличие приемника звука; • частота колебаний должна лежать в звуковом диапазоне;
- мощность звука должна быть достаточной для восприятия.
Звуковые волны – это упругие волны, вызывающие у человека ощущение звука, представляющие собой зоны сжатия и разряжения, передающиеся на расстояние с течением времени.
Классификация звуковых волн:
- инфразвук (\( \nu \) < 16 Гц);
- звуковой диапазон (16 Гц < \( \nu \) < 20 000 Гц);
- ультразвук (\( \nu \) > 20 000 Гц).
Скорость звука – это скорость распространения фазы колебания, т. е. области сжатия и разряжения среды.
Скорость звука зависит
от упругих свойств среды:
в воздухе – 331 м/с, в воде – 1400 м/с, в металле – 5000 м/с;
от температуры среды:
в воздухе при температуре 0°С – 331 м/с,
в воздухе при температуре +15°С – 340 м/с.
Характеристики звуковой волны
- Громкость – это величина, характеризующая слуховые ощущения человека, зависящая от амплитуды колебаний в звуковой волне. Единицы измерения – дБ (децибел).
- Высота тона – это величина, характеризующая слуховые ощущения человека, зависящая от частоты колебаний в звуковой волне. Чем больше частота, тем выше звук. Чем меньше частота, тем ниже звук.
- Тембр – это окраска звука.
Музыкальный звук – это звук, издаваемый гармонически колеблющимся телом. Каждому музыкальному тону соответствует определенная длина и частота звуковой волны.Шум – хаотическая смесь тонов.
Эффект резонанса
Ярким примером механического класса резонаторов является пружинный маятник. Профессор из технологического Массачусетского института (в Америке), В
Левин, акцентирует внимание своих студентов на то, что резонанс (resonance) – это эффект, сопряжённый с увеличением амплитуды. Для демонстрации явления используется установка
Она состоит из следующих компонентов:
- электродвигатель;
- механизм, превращающий вращение в возвратно-поступательное движение;
- ЛАТР – лабораторный автотрансформатор;
- медная пружина из проволоки с набором грузиков;
- направляющая для пружины.
Направление колебания пружины – вертикальное. Вращение вала мотора заставляет пружину совершать колебания. С помощью автотрансформатора присутствует возможность регулировать напряжение. Регулировка позволяет варьировать частоту вращения вала и колебаний маятника. При изменении частоты вращения вала амплитуда возвратно-поступательного движения остаётся неизменной.
Перед опытом замеряется удлинение медной пружины под действием грузиков (для оценки резонансной частоты пружины). Изменение скорости вращения вала заставляет амплитуду колебания конца пружины с грузом изменяться. Амплитуда увеличивается и на 1-м герце частоты становится максимальной (
Важно! При дальнейшем увеличении скорости вращения вала амплитуда конца пружины начинает уменьшаться. Это означает, что resonance пройден
Если уменьшать напряжение, а с ним и частоту вращения двигателя, снова можно наблюдать эффект resonance колебания пружины.
Добротность пружины Q определяется как отношение амплитуды колебания пружины Aпр к амплитуде колебания вынуждающей силы Aвс. В этом случае Q = Aпр/Aвс = 30/5 = 6, где Aвс = 5.
Частота колебаний
Кроме циклической частоты при описании колебаний используют линейную частоту (или просто частоту), обозначаемую $\nu$.
Линейная частота является величиной обратной периоду колебаний:
$\nu=\frac{1}{T}(4)$.
Она измеряется в герцах (Гц), тогда как единицей измерения циклической частоты является обратная секунда.
Определение 1
Частотой (линейной частотой) называют физическую величину, которая служит характеристикой периодического процесса, равную числу колебаний (повторений) за единицу времени.
$\nu=\frac{n}{t}(5),$
где $n$ — количество колебаний (повторений процесса); $t$ — время наблюдения.
Линейная частота связана с круговой частотой формулой:
$\nu=\frac{\omega_0}{2\pi}(6).$
Механические колебания и волны. Звук
Раздел ОГЭ по физике: 1.23. Механические колебания. Амплитуда, период и частота колебаний. Формула, связывающая частоту и период колебаний. Механические волны. Продольные и поперечные волны. Длина волны и скорость распространения волны. Звук. Громкость и высота звука. Скорость распространения звука. Отражение и преломление звуковой волны на границе двух сред. Инфразвук и ультразвук.



Движение, при котором состояния движущегося тела с течением времени повторяются, причём тело проходит через положение своего устойчивого равновесия поочерёдно в противоположных направлениях, называется механическим колебанием.
Условием возникновения колебания является наличие в системе возвращающей силы, всегда направленной к положению устойчивого равновесия. Каждый законченный цикл колебательного движения, после которого оно вновь повторяется, называется полным колебанием.
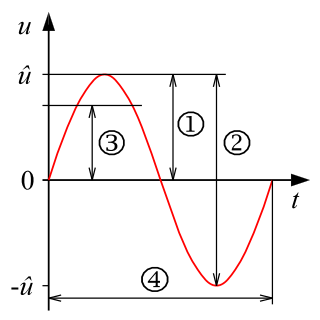
Смещением х называется отклонение колеблющейся точки от положения равновесия в данный момент времени.
Амплитудой колебаний хm называется модуль наибольшего смещения тела от положения равновесия при колебательном движении.
Периодом колебания Т называется время, за которое совершается одно полное колебание: Т = tN.
Величину, равную числу колебаний, совершаемых за единицу времени, называют частотой колебаний
Механическое колебание, при котором координата тела меняется по закону синуса или косинуса, называется гармоническим колебанием.
Математическим маятником называют материальную точку, подвешенную на тонкой нерастяжимой нити. Маленький металлический шарик, подвешенный на длинной нити, можно условно считать математическим маятником.
При колебаниях математического маятника (в отсутствие сил трения) выполняется закон сохранения механической энергии и периодически происходит переход потенциальной энергии в кинетическую и обратно.
В положении максимального отклонения от положения равновесия потенциальная энергия маятника максимальна, а кинетическая равна нулю. При приближении к положению равновесия потенциальная энергия уменьшается, а кинетическая увеличивается, достигая максимального значения в положении равновесия, в котором потенциальная становится равной нулю: Wполн = Wп + Wк = const Eполн = Eк max = Еп maх.
Затухающими называются колебания, амплитуда которых уменьшается с течением времени. Затухание свободных механических гармонических колебаний связано с уменьшением механической энергии колебательной системы за счёт работы сил сопротивления (трения).
Механические волны. Звук
Если в упругой среде (газ, жидкость или твёрдое тело) имеется источник колебаний, то в ней с течением времени происходит процесс распространения колебаний, этот процесс называется волной.
Волны, распространяющиеся в упругой среде, называются механическими волнами. В волне осуществляется перенос энергии колебательного движения без переноса вещества (массы) среды, в которой распространяется волна. Периодом Т волны является период колебаний точек среды при распространении волны. Длиной волны λ называется расстояние, на которое распространяется волна за один период колебаний: λ = ʋT; ʋ = λv.
Продольными волнами называются волны, в которых направление колебаний частиц происходит в направлении распространения волны. Продольные механические волны могут распространяться в твёрдых, в жидких и в газообразных средах.
Поперечными называются волны, в которых направление колебаний частиц происходит перпендикулярно направлению распространения волны. Поперечные механические волны могут распространяться только в твёрдых телах и на свободной поверхности жидкости.
Звуковыми волнами называются механические волны, вызывающие у человека ощущение звука: ʋзв = (16 ÷ 20 000) Гц.
Характеристики звука
Громкость звука определяется амплитудой колебаний.
Высота тона определяется частотой колебаний.
Скорость звука зависит от плотности среды. Скорость звука в твёрдых телах больше, чем в жидкостях, а в жидкостях больше, чем в газах. Скорость звука увеличивается с ростом температуры среды.
В случае, когда отражающая поверхность перпендикулярна распространению волны, звуковая волна после отражения возвращается обратно к источнику звука. Такой случай отражения называется эхом.
В гидролокации эхо используется для определения глубин, расстояний до преград и других судов.
Конспект урока «Механические колебания и механические волны. Звук».
Следующая тема: «МКТ. Агрегатные состояния вещества».
Циклическая частота[ | код]
Основная статья: Угловая частота
В теории электромагнетизма, теоретической физике, а также в некоторых прикладных электрорадиотехнических расчётах удобно использовать дополнительную величину — циклическую (круговую, радиальную, угловую) частоту (обычно обозначается ω). Углова́я частота́ (синонимы: радиальная частота, циклическая частота, круговая частота) — скалярная физическая величина. В случае вращательного движения угловая частота равна модулю вектора угловой скорости. В системах СИ и СГС угловая частота выражается в радианах в секунду, её размерность обратна размерности времени (радианы безразмерны).
Угловая частота в радианах в секунду выражается через частоту ν (выражаемую в оборотах в секунду или колебаниях в секунду), как ω = 2πν.
В случае использования в качестве единицы угловой частоты градусов в секунду связь с обычной частотой будет следующей: ω = 360°ν.
Численно циклическая частота равна числу циклов (колебаний, оборотов) за 2π секунд. Введение циклической частоты (в её основной размерности — радианах в секунду) позволяет упростить многие формулы в теоретической физике и электронике. Так, резонансная циклическая частота колебательного LC-контура равна ωLC=1LC,{\displaystyle \omega _{LC}=1/{\sqrt {LC}},} тогда как обычная резонансная частота νLC=1(2πLC).{\displaystyle \nu _{LC}=1/(2\pi {\sqrt {LC}}).} В то же время ряд других формул усложняется. Решающим соображением в пользу циклической частоты стало то, что множители 2π{\displaystyle 2\pi } и 12π{\displaystyle 1/2\pi }, появляющиеся во многих формулах при использовании радианов для измерения углов и фаз, исчезают при введении циклической частоты.


В механике при рассмотрении вращательного движения аналогом циклической частоты служит угловая скорость.
Кинематическая модель гармонических колебаний
Пусть материальная точка $A$ равномерно движется по окружности (рис.1). Угловую скорость ее движения обозначим $\omega_0=const$. Радиус окружности равен $R$.
 Рисунок 1. Точка движется по окружности. Автор24 — интернет-биржа студенческих работ
Рисунок 1. Точка движется по окружности. Автор24 — интернет-биржа студенческих работ
Проектируя место наше точки в момент времени $t$ (рис.1) на ось $OZ$ мы получим точку $Z$, которая находится на расстоянии $z$ от начала координат (точки $O$). С течением времени (в ходе перемещения материальной точки $A$ по окружности) точка $Z$ будет совершать колебания от положения $Z_1$ до положения $Z_2$ и в обратную сторону.
Рассматриваемое колебание точки $Z$ будет гармоническим. Для его описания достаточно записать закон изменения расстояния $z$ (координаты $z$) от начала координат (точки $O$) в зависимости от времени, то есть получить функцию $z(t)$.
Будем считать, что при $t=0$ радиус $ОA$ составляет угол $\alpha$ с осью $OZ$. Через время $t$ данный угол изменится на величину $\omega_0 t$. Из прямоугольного треугольника $OZA$ мы получим:
$z(t)=R\cos (\omega_0 t+\alpha)=z_m\cos (\omega_0 t+\alpha) (2).$
Выражение (2) описывает гармонические колебания точки $A$ по оси $OZ$.
Параметр $R=z_m$ в данном случае – это наибольшее отклонение точки, выполняющей колебания от положения равновесия (точки $O$), данный параметр носит название амплитуды колебаний.
Угловая скорость вращения точки по окружности в данной модели будет играть роль циклической частоты колебаний.
- При начальной фазе колебаний равной нулю $(\alpha=0),$ имеем $z(t)= z_m\cos (\omega_0 t );$
- При $\alpha=\frac{\pi}{2}$ мы получим, что $z(t)= z_m\sin (\omega_0 t ).$
Мы видим, что при гармонических колебаниях координата $z$ является функцией синуса или косинуса, зависящей от времени.
Гармонические колебания часто изображают в виде графиков. При этом по горизонтальной оси откладывают время, на вертикальной оси — координату. Получают периодическую кривую (синусоиду или косинусоиду). При этом форма кривой зависит только от амплитуды и круговой частоты гармонических колебаний. Положение данной кривой определяет начальная фаза колебаний.
Колебания в нелинейных системах
Собственные колебания нелинейных систем не поддаются простой классификации. Нелинейность систем с дискретным спектром частот собственных колебаний приводят к переходу энергии по спектральным компонентам. При этом возникает явление конкуренции гармоник – выживание одних и подавление других.
Подобный процесс может стабилизировать дисперсия. Она может привести к появлению устойчивых пространственно-временных образований (например, солитоны).
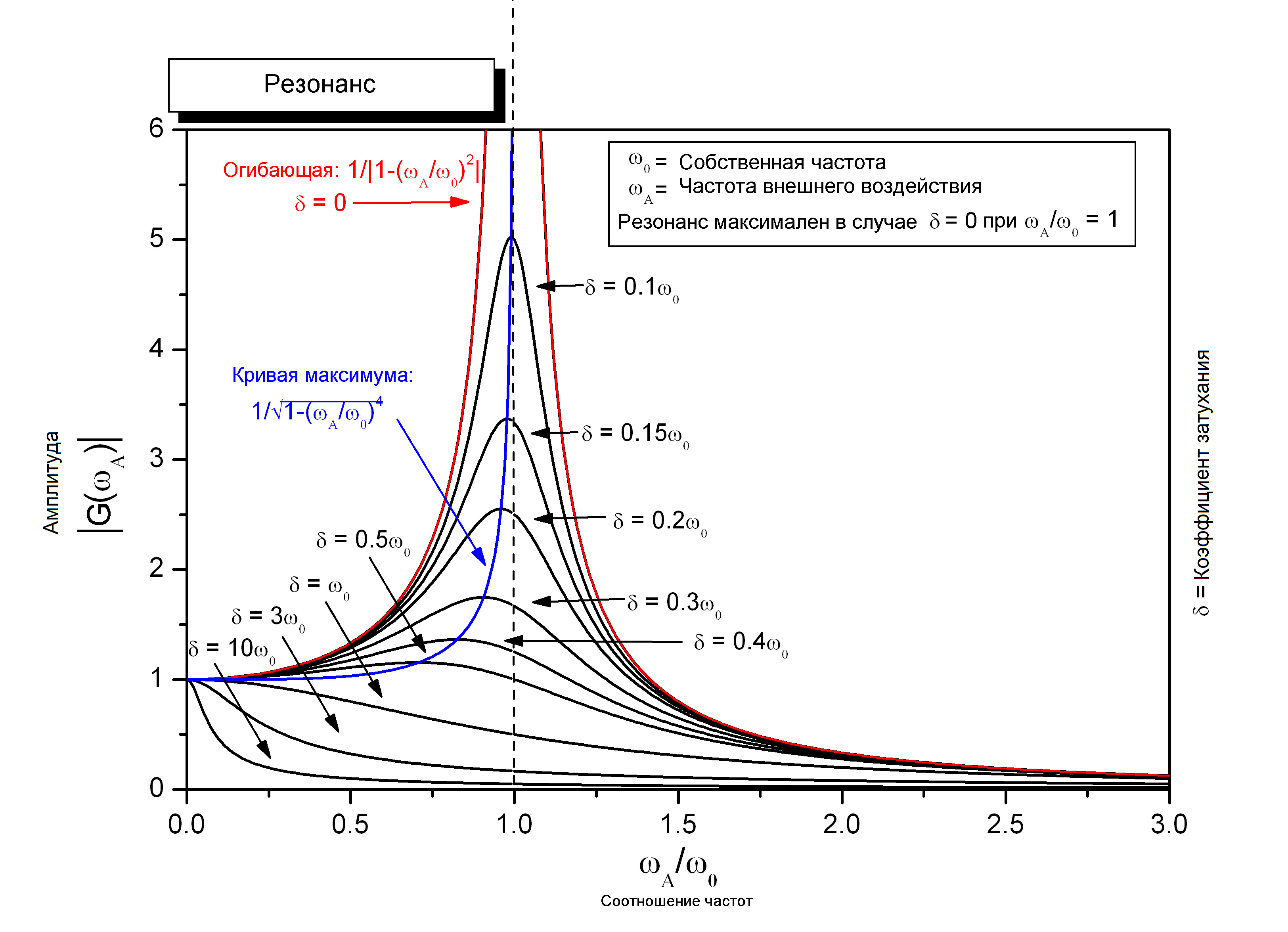
Большое значение при возбуждении колебаний может иметь явление резонанса, которое заключается в резком увеличении амплитуды колебаний (отклика). Данное явление наблюдается при приближении частоты внешних воздействий на систему к некоторой резонансной частоте, которая характеризует настоящую систему.
Если система линейна и ее параметры находятся вне зависимости от времени, то резонансные частоты совпадают с частотой собственных ее колебаний. Отклик системы в данном случае будет усиливаться с увеличением добротности колебательной системы $Q$.
Раскачка будет происходить до тех пор, пока энергия, поступающая извне (например, полученная при отклонении маятника от положения равновесия) будет превышать потери за время осцилляции. Что касается линейных колебаний, то энергия, вносимая извне будет пропорциональна амплитуде, а потери будут расти пропорционально ее квадрату. Отсюда следует, что баланс энергии достижим во всех случаях.
Резонансная частота
При подаче на два КК (параллельного и последовательного) переменного напряжения с изменяющейся частотой их реактивные сопротивления C и L будут меняться. Изменения происходят следующим образом:
- с увеличением f – ёмкостное сопротивление уменьшается, а индуктивное увеличивается;
- с уменьшением f – ёмкостное сопротивление увеличивается, а индуктивное уменьшается.
Частота, при которой реактивные сопротивления обоих элементов контура равны, называется резонансной.
Важно! При fрез сопротивление параллельного КК будет максимальным, а последовательного КК – минимальным. Резонансная частота формула, которой имеет вид:
Резонансная частота формула, которой имеет вид:
где:
- L – индуктивность, Гн;
- C – ёмкость, Ф.
Подставляя известные значения ёмкости и индуктивности в формулу резонансной частоты колебательного контура любой конфигурации, можно рассчитать этот параметр.
Для определения периода колебаний КК и частоты резонанса можно воспользоваться онлайн калькулятором на соответствующем портале в сети. Профессиональная программа имеет несложный интерфейс.
Примечания
- Частота // Научно-технический энциклопедический словарь (рус.). Статья в Научно-техническом энциклопедическом словаре.
- . Membrana (5 февраля 2010). Дата обращения 4 марта 2011.
- Финк Л. М. Сигналы, помехи, ошибки… Заметки о некоторых неожиданностях, парадоксах и заблуждениях в теории связи. — М.: Радио и связь, 1978, 1984.
- . Большой энциклопедический политехнический словарь. Дата обращения 27 октября 2016.
- Чертов А. Г. Единицы физических величин. — М.: «Высшая школа», 1977. — С. 33. — 287 с.
- Деньгуб В. М., Смирнов В. Г. Единицы величин. Словарь-справочник. — М.: Издательство стандартов, 1990. — С. 104. — 240 с. — ISBN 5-7050-0118-5.
- . Iec.ch. Дата обращения 2 июня 2013.
- Иногда за границу между инфразвуком и слышимым звуком принимают частоту 16 Гц.
Резонансный усилитель мощности тока промышленной частоты
Резонансный усилитель мощности тока промышленной частоты – это статический электромагнитный аппарат, предназначенный для усиления мощности тока промышленной частоты 50 Гц.
Резонанс (франц. resonance, от лат. resono – звучу в ответ, откликаюсь), относительно большой (селективный) отклик колебательной системы (осциллятора) на периодич. воздействие с частотой, близкой к частоте ее собств. колебаний. При Р. происходит резкое возрастание амплитуды вынужденных колебаний осциллятора.
• Физический энциклопедический словарь/ Гл. ред. А.М. Прохоров. Ред. кол. Д.М. Алексеев, А.М. Бонч- Бруевич, А.С. Боровик-Романов и др. – М.: Сов. энциклопедия, 1983. – 928 с., ил., 2 л. цв. ил.
Резонанс играет очень большую роль в самых разнообразных явлениях, причем в одних полезную, в других вредную.
В 1906 г. в Петербурге обрушился Египетский мост через реку Фонтанку.


Причина – резонансные явления, вызванные переходом через мост кавалерийского эскадрона. Шаг лошадей, обученных церемониальному маршу, попал в резонанс с периодом моста. Таких примеров из истории техники можно привести много. Резонанс в этих случаях вредное явление и для устранения его принимаются специальные меры (расстройка периодов, увеличение затухания – демпфирование и др.).
В радиотехнике резонанс используется, в основном, как полезное явление.
Явление электрического резонанса позволяет настраивать передатчики и приемники на заданные частоты и обеспечить их работу без взаимных помех. Вообще применения резонансных явлений в электро-радиотехнике неисчислимы. Однако законы сохранения накладывают запреты на применение резонанса для получения Свободной энергии, а у сторонников получения ее сложились устойчивые стереотипы относительно параметрического резонансного усиления. Поэтому не все еще применения явления резонанса реализованы на практике.
В настоящее время очень много копий сломано при рассмотрении темы «Резонанс Мельниченко». Есть даже категория людей, которые объявляют его шарлатаном.
Мельниченко скрывает секрет своих изобретений, несмотря на полученные патенты. Но секрет Мельниченко – это «Секрет Полишинеля».
Попробуем доказать это. Возьмем всем известную книгу «Элементарный учебник физики под ред. акад. Г.С. Лансберга Том III Колебания, волны. Оптика. Строение атома. – М.: 1975г., 640 с. с илл.» откроем ее на страницах 81 и 82 где приведено описание экспериментальной установки для получения резонанса на частоту городского тока
В приведенном примере ясно показывается, как можно на индуктивности и емкости получить напряжения в десятки раз большие, чем напряжение источника питания. Если не принимать специальных мер, то мощность, развиваемая резонансом, разрушит элементы установки.
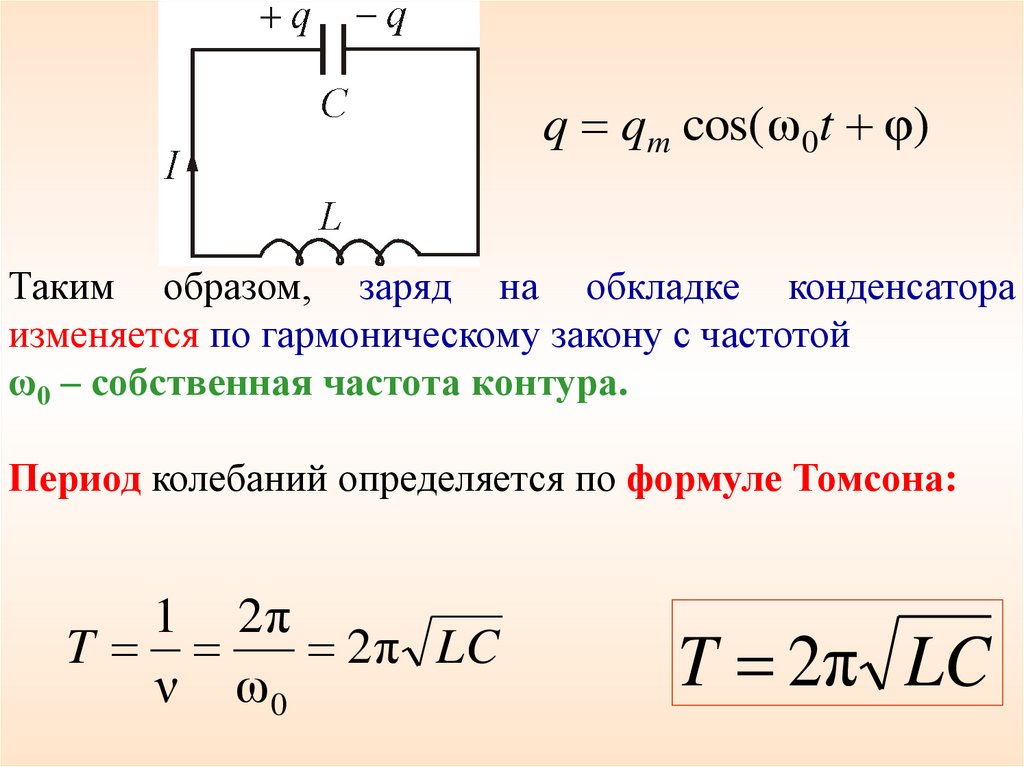
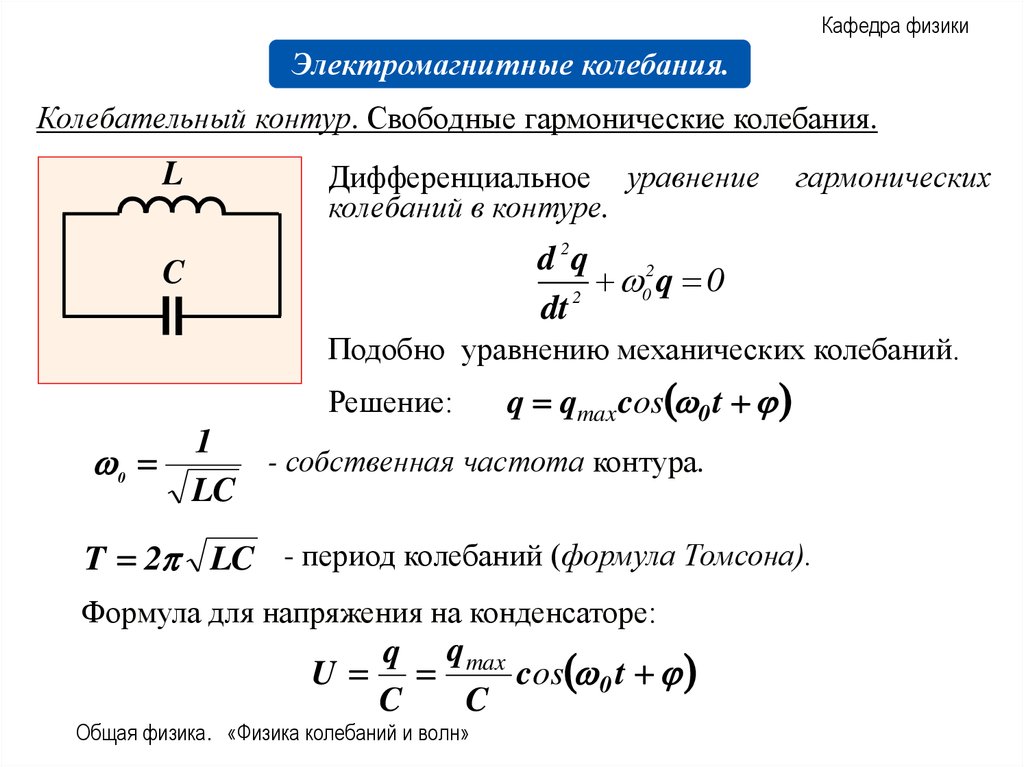
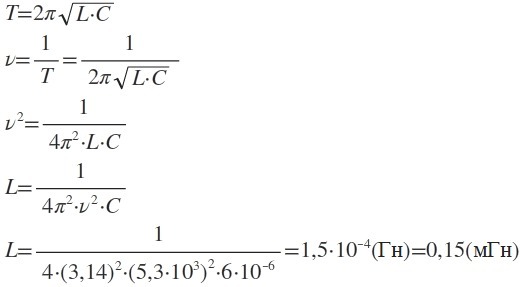
Формула Томсона
Из последнего соотношения можно получить значение периода электромагнитных колебаний:
$$T={2\pi\over \omega}={2\pi\sqrt{LC}}$$
Данная формула впервые была получена У. Томсоном и носит его имя.

Рис. 3. У. Томсон (Кельвин).
Из данной формулы можно видеть, что время одного колебания (период) тем дольше, тем больше индуктивность и емкость. Это происходит потому, что большая емкость требует больше времени для полной зарядки. А большая индуктивность при изменении тока порождает большую ЭДС самоиндукции, которая, согласно правилу Ленца, направлена так, чтобы сопротивляться причине, ее порождающей. Таким образом, ток через большую индуктивность меняется медленнее, что также увеличивает период колебаний.
Во многих случаях удобнее использовать формулу частоты электромагнитных колебаний, которая получается из формулы Томсона, если учесть, что период и частота – взаимно обратны:
$$\nu ={1\over 2\pi\sqrt{LC}}$$
Что мы узнали?
Простейшей системой, в которой возможны электромагнитные колебания, является колебательный контур, состоящий из катушки индуктивности и конденсатора. Частота электромагнитных колебаний в контуре может быть получена из значений емкости конденсатора и индуктивности катушки с использованием формулы Томсона.
Тест по теме
-
Вопрос 1 из 5
Простейшей системой, в которой могут существовать электромагнитные колебания, является …
- несколько соединенных проводников
- диэлектрик внутри проводника
- пружина, закрепленная на одном конце
- контур, состоящий из конденсатора и катушки
Начать тест(новая вкладка)