Введение
Постоянно общаясь с разными людьми, я как человек, некоторым образом по образованию и по роду профессиональной деятельности имеющий отношение к робототехнике, неоднократно сталкивался с различными трактовками понятия «робот». Собрания специалистов в области робототехники иногда сопровождались беспощадными дискуссиями на эту тему. Дискуссии бывали столь же бесплодными в попытке прийти к единому, всеми признаваемому определению, сколь и малоосмысленными, с точки зрения неспециалиста. Какой смысл в словесной эквилибристике, думает обычный человек, если она никак не помогает в решении практических задач?
Роботы в культуре
Основная статья: Роботы в культуре
Робот из фильма «День, когда остановилась Земля», ставший прообразом многих роботов в кино-фантастике
Роботы как культурный феномен появились с пьесой Карела Чапека «R.U.R.», описывающей конвейер, на котором роботы собирают самих себя. С развитием технологии люди всё чаще видели в механических созданиях нечто большее, нежели просто игрушки. Литература отразила страхи человечества по поводу возможности замены людей их собственными творениями. В дальнейшем эти идеи развиваются в фильмах «Метрополис» (1927), «Бегущий по лезвию» (1982) и «Терминатор» (1984). Как роботы с искусственным интеллектом становятся реальностью и взаимодействуют с человеком, показано в фильмах «Искусственный разум» (2001) режиссёра Стивена Спилберга и «Я, робот» (2004) режиссёра Алекса Пройаса.
Из научной фантастики известны три закона роботехники, впервые сформулированные Айзеком Азимовым (с помощью Джона Кэмпбелла) в рассказе «Хоровод» (1942):
В Японии обрели популярность аниме, в которых фигурируют роботы. Символами японской анимации стали такие серии, как Transformers, Gundam, Voltron, Neon Genesis Evangelion, Гуррен-Лаган. Во многом благодаря этому начиная с 1980—1990 годов роботы стали частью национальной культуры Японии, а также частью стереотипов о ней.[источник не указан 1257 дней]
Существует жанр видеоигр, непосредственно связанный с роботами — симуляторы меха. Наиболее известным представителем этого жанра является серия игр MechWarrior. В таких играх, как Lost Planet, Shogo: Mobile Armor Division, Quake IV, Chrome, Unreal Tournament 3, Battlefield 2142, F.E.A.R. 2: Project Origin, Tekken, Mortal Kombat, имеется возможность управлять роботами. Ещё одним примером видеоигры с участием роботов является Scrapland.
В браузере Mozilla Firefox, начиная с 3-й версии, есть специфичная страница — виртуальное пасхальное яйцо с шуточным посланием от роботов к людям.
В 2007 году в Германии была создана музыкальная группа Compressorhead, состоящая из роботов и играющая в стиле хеви-метал.
Виды роботов
Общепринятой классификации роботов не существует. Основные характеристики, по которым можно условно поделить все модели – назначение и внешний интерфейс.
По внешнему интерфейсу роботы делятся на:
Андроиды
Андроиды внешне абсолютно идентичны человеку, поэтому имеют второе название «синтетический человек». Они способны поддерживать разговор, используя большой словарный запас, а их поведение зависит от факторов внешней среды и логично изменяется. Сфера обслуживания теоретически может перейти на использование андроидов вместо многих сотрудников.
(Робот андроид)
Роботы, подобные животным
Применяются в качестве игрушек или в целях слежки за дикими животными в их естественных условиях обитания. Уже изобретены электронные зооморфы внешне идентичные гикконам, белкам, собакам, медузам, червям, гепардам и т.д.
(Робот собака)
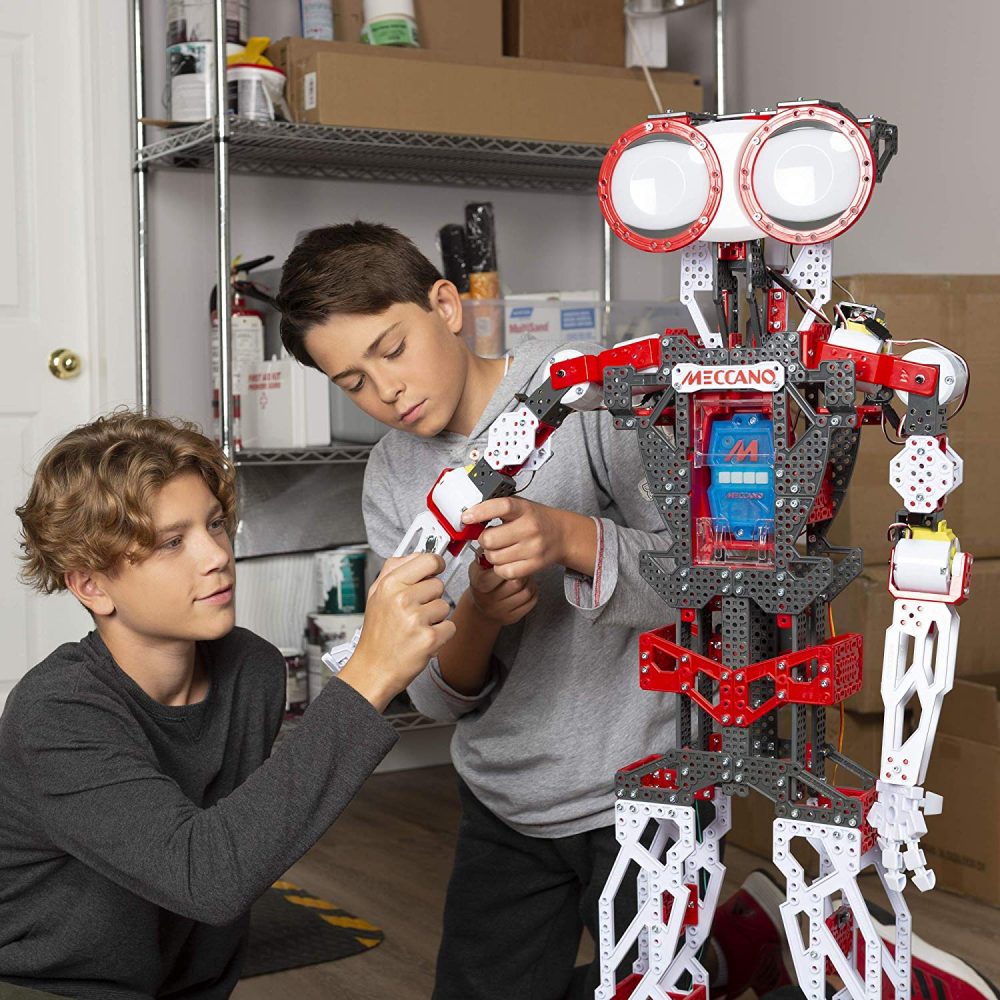
Гуманоидные роботы
Внешне они отдалённо напоминают человека. В основном их корпус состоит из подобия головы, рук, ног и туловища. Но эти элементы более схожи с частями машины, нежели человека. Гуманоиды обычно имеют узкую направленность действий, например раздача рекламных листовок, определённая игра с детьми.
(Робот компаньон)
- По выполняемым функциям выделяют:
Бытовые роботы
Ежедневное применение в быту отличает эту группу роботов от других. Помимо всеобще известных роботов-пылесосов и мойщиков окон, к этому классу относятся робоигрушки для детей и средства-коммуникаторы, создающие эффект присутствия человека, находящегося на большом расстоянии (передающие его сердцебиение или частоту дыхания).
(Робот-пылесос)
Промышленные роботы
Замена человеческого труда на производстве роботизированным механизмом широко распространена по ряду причин. Качество выпускаемой продукции возрастает за счёт исключения ошибок, связанных с «человеческим фактором». Работоспособность 24 часа в сутки, 7 дней в неделю повышает производительность предприятия минимум дважды. Никакие вредные испарения или излучения не становятся помехой в работе.
(Робот для захвата предметов)
Операции, выполняемые промышленными роботами: штамповка, сварка, фрезеровка, транспортировка грузов, сборка, обработка, окрашивание и т.д.
Боевые роботы
Минимизация человеческих потерь в военных действиях достигается посредствам введения в вооруженные силы роботов. Для каждого рода войск разработаны определённые модели: роботы-сапёры, беспилотники, подводные и надводные корабли с дистанционным управлением, вертолёты-разведчики, роботы-минёры и т.п.









(Военный робот)
Из-за неоднозначности мнений по поводу ответственности за действия роботов их применение в реальных условиях ограничено.
Микророботы
Отличительной особенностью этого вида является сверхмалый размер – до 1мм. Чаще всего работа таких устройств связана с групповым взаимодействием (например, для быстрого построения сверхпрочной и лёгкой материи) или с объектами, площадь которых исчисляется микрометрами.
(Микроустройство размером с частицу — Наноробот)
Рассматриваются перспективы применения микроустройств — нанороботов в медицинских целях (для проникновения в организм с последующей диагностикой).
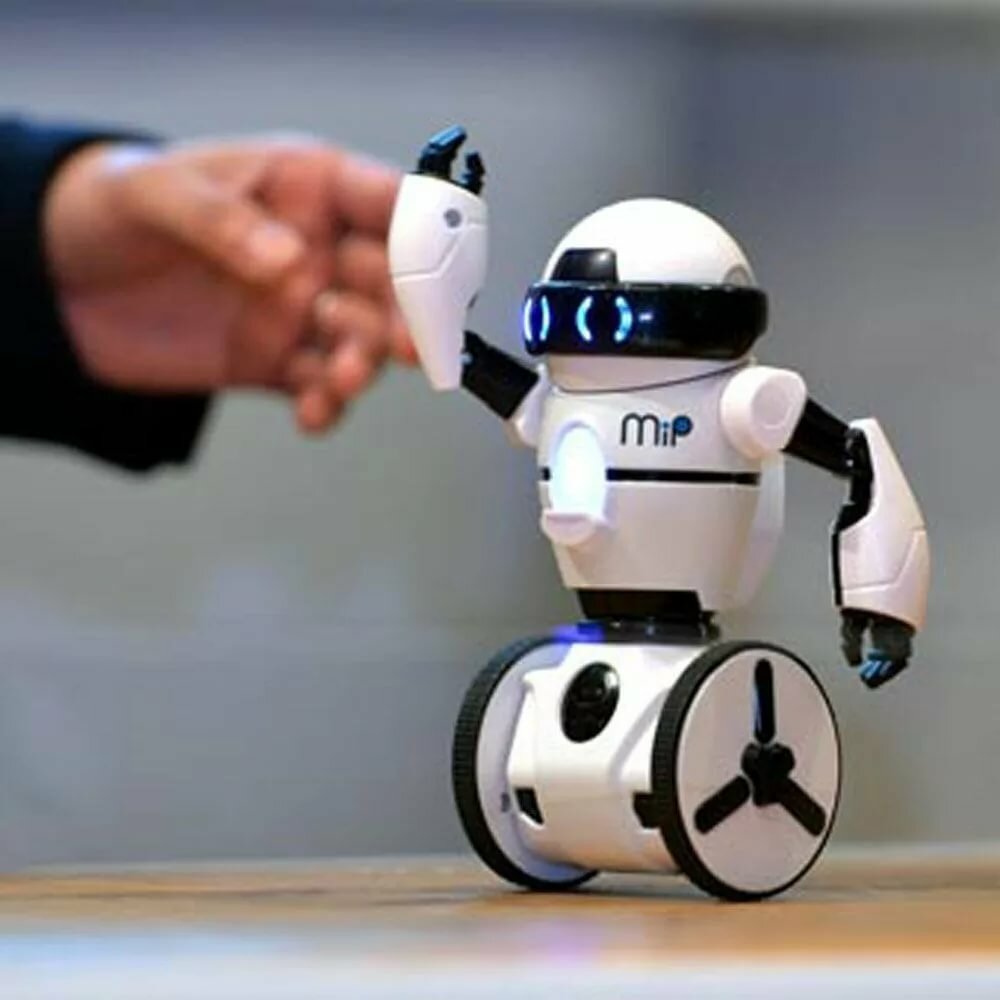
Персональные роботы
Персональные роботы предназначены для сопровождения определённого человека, выполнения его просьб, общения с ним. Из-за недостаточной совершенности ПО идеальный компаньон для человека ещё не создан. Разработчики предполагают, что он будет иметь чувствительные датчики для распознавания не только звуковых сигналов, но и мимики, жестов, манеры поведения объекта. Запоминание характерных черт поведения и самосовершенствование позволят добиться взаимопонимания между роботом и пользователем.
(Персональный робот будущего)
Специализированные роботы
Технические роботы определенных специальностей с узкой спецификой и олее широким применением определенных отраслей:
- Транспортные — основные направления деятельности транспортных роботов – это автономное управление средствами передвижения (автопилотирование, самоходные автомобили) и перемещение грузов.
- Исследовательские — используются для сбора данных из труднодоступных для человека областей, для направления их на изучение специалистам. При этом объекты исследования могут быть самыми разнообразными: от подземного пространства до поверхности планет.
- Сельскохозяйственные — применяются в основном для выполнения монотонных и трудных операций, таких как вспахивание земли, высадка, прополка, обработка удобрениями больших площадей и т.д.
- …и других специализированных областей.
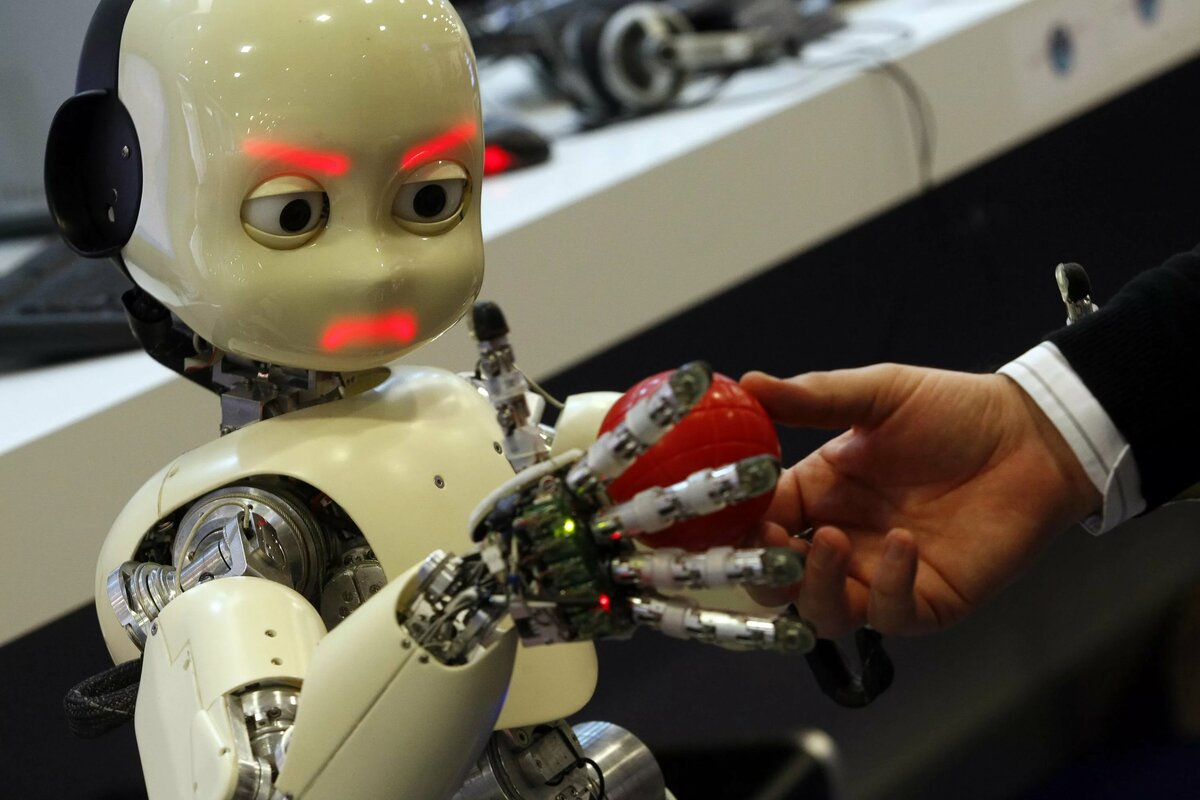
Хронология создания и развития роботов-андроидов

(Макет робота-андроида с человеческой внешностью)
Хронология по датам создания, появления термина и развития человекоподобных роботов-андроидов.
- Прототип Андроидов, «Железный человек Альберта Кельнского — примерно середина 13 века
- George (США) — 1949
- Repliee R-1 (Япония) — 2005
- Repliee R-2 (Япония) — 2005
- TOPIO (Вьетнам) — 2005
- EveR-1 (Южная Корея) — 2006
- AIKO (Канада) — 2007
- HRP-4C Миим девушка (Китай) — 2009
- Ibn Sina Robot (Арабские Эмираты) — 2009
- Пушкин (Россия) — 2010
- Алиса (Россия) — 2011
- ASIMO (Япония) — 2014
- София (Китай) — 2015
- Einstein Robot (США) — 2017
- Betsy (Россия) — 2019

(Робот C-3PO из «Звездные войны»)
Примечания
- , с. 15.
- , с. 4.
- . // Сайт Федерального агентства по техническому регулированию и метрологии. Дата обращения 11 июня 2015.
- , с. 7—8.
- Springer Handbook of Automation / Ed. by S. Y. Nof. — Berlin: Springer Verlag, 2009. — lxxv + 1812 p. — ISBN 978-3-540-78830-0. — P. 450.
- , с. 13.
- Angelo J. A. . Robotics: A Reference Guide to the New Technology. — Westport, Conn.: Greenwood Press, 2007. — xiv + 417 p. — ISBN 1-57356-337-4. — P. 40.
- Handbook of Industrial Robotics. 2nd ed / Ed. by S. Y. Nof. — New York: John Wiley & Sons, 1999. — 1378 p. — ISBN 978-0-471-17783-8. — P. 3—5.
- ↑ , с. 176.
- , с. 17.
- ↑ . // IFR, International Federation of Robotics. Дата обращения 1 января 2015.
- , с. 19.
- Paul Mickle. . // The capital Century — 100 stories of New Jersey history. Дата обращения 24 января 2015.
- , с. 18.
- , с. 20—21.
- , с. 5.
- , с. 24—26.
- , с. 19.
- , с. 19, 28—30.
- , с. 8.
- — С. 90—99.
- , с. 18.
- , с. 25—26.
- ↑ , с. 22—25.
- , с. 35—39.
- , с. 14—16.
- , с. 262.
- . // ParalleMIC — the Parallel Mechanisms Information Center. Дата обращения 24 января 2015.
- — С. 13—22.
- ↑ , с. 274—276.
- Бурдаков С. Ф., Дьяченко В. А., Тимофеев А. Н. . Проектирование манипуляторов промышленных роботов и робототизированных комплексов. — М.: Высшая школа, 1986. — 264 с. — С. 6, 21—22.
- , с. 46.
- , с. 9.
- , с. 183.
- , с. 267—268.
- , с. 94.
- , с. 8.
- , с. 19—23.
- , с. 205—206.
- ↑ , с. 28—29.
- ↑ (недоступная ссылка). // Сайт www.robomatic.ru. Дата обращения 28 января 2015.
- , с. 269.
- , с. 11—12, 17—18.
- , с. 384, 431—432.
- , с. 16—17.
- , с. 20—25.
- , с. 31—32.
- , с. 286—289, 293—298.
- ↑
- ↑ Молчанов Д. А., Ворочаев А. В., Казарян К. Г. . // Молодёжь и XXI век — 2017: материалы VII Международной молодёжной научной конференции (Курск, 21—22 февраля 2017 г.): в 4 томах. — Курск: Университетская книга, 2017. — С. 156—160.
- Градецкий В. Г., Князьков М. М., Фомин Л. Ф., Чащухин В. Г. . Механика миниатюрных роботов. — М.: Наука, 2010. — 264 с. — ISBN 978-5-02-036969-6. — С. 6, 155—158.
- — P. 1826—1829.
- Осадченко Н. В., Абдельрахман А. М. З. Компьютерное моделирование движения мобильного ползающего робота // Вестник МЭИ. — 2008. — № 5. — С. 131—136.
- Moghaddam M. M., Hadi A. M. . // 22nd International Symposium on Automation and Robotics in Construction (ISARC; Ferrara, 11—14 Sep. 2005). — 2005. — P. 1—5.
- Градецкий В. Г., Князьков М. М., Кравчук Л. Н., Семёнов Е. А. Методы движения миниатюрных управляемых внутритрубных роботов // Нано- и микросистемная техника. — 2005. — № 9. — С. 37—42.
- Guo Shuxiang, Fu Qiang, Yamauchi Yasuhiro, Yue Chunfeng. . // Proceedings of 2013 IEEE International Conference on Mechatronics and Automation (Takamatsu, 4—7 Aug. 2013). — IEEE, 2013. — P. 831—836.
- , с. 30—31.
- . // IFR, International Federation of Robotics. Дата обращения 28 января 2015. (недоступная ссылка)
Боевые роботы
Боевым роботом называют автоматическое устройство, заменяющее человека в боевых ситуациях или при работе в условиях, несовместимых с возможностями человека, в военных целях: разведка, боевые действия, разминирование и т. п.
Беспилотник
Боевыми роботами являются не только автоматические устройства с антропоморфным действием, которые частично или полностью заменяют человека, но и действующие в воздушной и водной среде, не являющейся средой обитания человека (авиационные беспилотные с дистанционным управлением, подводные аппараты и надводные корабли).
В настоящее время большинство боевых роботов являются устройствами телеприсутствия, и лишь очень немногие модели имеют возможность выполнять некоторые задачи автономно, без вмешательства оператора.
В Технологическом институте Джорджии под руководством профессора Хенрика Кристенсена разработаны напоминающие муравьёв инсектоморфные роботы, способные обследовать здание на предмет наличия там врагов и мин-ловушек (доставляются к зданию «главным роботом» — мобильным роботом на гусеничном ходу).
Получили распространение в войсках и летающие роботы. На начало 2012 года военными во всём мире использовались около 10 тысяч наземных и 5 тысяч летающих роботов; 45 стран мира разрабатывало или закупало военных роботов.
Роботы
Подумай!
- Что такое робот и когда он появился?
- Что тебе известно о роботах?
- Рассмотри рисунок 1. Расскажи, в каких отраслях задействованы роботы?
Рис.1
Робот создается максимально похожим на живой организм и получает информацию об окружающем мире через разные датчики (сенсоры). Робот – это автоматическое устройство. Он действует согласно программе, которая была в него заранее загружена. Впервые слово «робот» было использовано чешскими писателями братьями Карелом и Йозефом Чапеками в 1920 году в пьесе «Россумские универсальные роботы». Робот происходит от чешского слова robot или robota и понимается как «подневольный труд». В наши дни на телепередачах на казахском языке робота еще называют «құлтемір» (дословный перевод на русский язык – «железный раб»).
Зачем нужны роботы? Роботы необходимы для замены людей при выполнении тяжелой производственной и опасной работы (например, разминирование). Робот представляет собой модель человека. При создании любого робота копируют структуру живых органов и органы чувств человека или животного. То есть к роботу применяют принципы прикладной науки таких, как бионика. Роботы могут работать самостоятельно или под наблюдением человека (оператора), который будет давать им команды. Роботы, похожие на людей, называются андроидами. Они часто используются как игрушки или как помощники по дому.
Робот – исполнительный механизм, программируемый по двум или более ступеням подвижности. Он обладает определенной степенью автономности и способен перемещаться во внешней среде с целью выполнения заданных задач по назначению.






Устройство можно назвать роботом при условии одновременного соблюдения трех условий. Что это за условия? SENSE (ЧУВСТВО, ОЩУЩЕНИЕ): робот обладает способностью воспринимать окружающий мир с помощью сенсоров. Такими сенсорами могут быть микрофоны, камеры, различные электромеханические сенсоры и прочее. ACT (ДЕЙСТВИЕ): в результате принятого решения выполнить некоторое действие. Оказание определенного влияния на внешний мир. THINK (МЫСЛИТЬ): понимание или размышление об информации или команде, полученной из внешнего мира. Планирование и принятие решений в результате понимания и размышления (рис.2).
Рис.2
Какие виды роботов существуют в настоящее время?
производственный робот — өндірістік робот — production robotмедицинский робот — медициналық робот — medical robot
Основные виды роботов
Промышленные роботы – это автоматические машины. Они часто используются в промышленности вместо людей для выполнения отдельных технологических задач. К ним относятся роботизированные станки, производственные линии (конвейеры) и манипуляторы. Медицинский робот используется для выполнения хирургических операций, введения инъекций в вены, массажа и других медицинских услуг. Самый известный хирургический робот – da Vinci. С его помощью несколько операторов -хирургов выполняют высокоточные операции. Для выполнения более точечных операций на органах человека используют очень маленьких нано-роботов.
Бытовые роботы облегчают жизнь человеку и играют роль помощника по дому. Эти роботы выполняют секретарские функции, убирают комнаты, играют роль животных. Например, робот-собачка, который может выполнять некоторые команды, робот-пылесос и другие. Боевые роботы обычно предназначены для замены людей в труднодоступных и особо опасных боевых ситуациях. К этим роботам относятся роботы-минеры, роботы-саперы, роботы-разведчики, роботы-танки, роботы-санитары и многое другое.
Учитель-робот может читать вслух, общаться на разных языках и задавать задания. Но, пока роботы не распознают человеческие эмоции, они не могут мыслить, как человек. Они не могут выполнять такие задачи, как мотивация учащихся, управление классом.
Вышеперечисленные виды роботов нельзя считать завершенными продуктами. Причина в том, что эта отрасль только начала развиваться. В будущем могут появится роботы, выполняющие некоторые функции человека в повседневной жизни.
Это интересно!
Первый робот был создан американским инженером Д.Уэксли для Всемирной выставки в Нью-Йорке в 1927 году. Этот робот имел простую структуру, но мог исполнять ряд команд, рассчитанных на выполнение простейших действий. А также воспроизводить, определенные фразы по команде человека.
Роботы-учёные
Первые роботы-учёные Адам и Ева были созданы в рамках проекта Robot Scientist университета Аберистуита и в 2009 году одним из них было совершено первое научное открыти.
К роботам-учёным безусловно можно отнести роботов, с помощью которых исследовались вентиляционные шахты Большой Пирамиды Хеопса. С их помощью были открыты т. н. «дверки Гантенбринка» и т. н. «ниши Хеопса». Исследования продолжаются.
Система передвижения
Для передвижения по открытой местности чаще всего используют колёсный или гусеничный движитель (примерами подобных роботов могут служить Warrior и PackBot).
Реже используются шагающие системы (примерами подобных роботов могут служить BigDog и Asimo).
Роботы BigDog
Для неровных поверхностей создаются гибридные конструкции, сочетающие колёсный или гусеничный ход со сложной кинематикой движения колёс. Такая конструкция была применена в луноходе.
Внутри помещений, на промышленных объектах роботы передвигаются вдоль монорельсов, по напольной колее и т. д. Для перемещения по наклонным или вертикальным плоскостям, по трубам используются системы, аналогичные «шагающим» конструкциям, но с вакуумными присосками.
Также известны роботы, использующие принципы движения живых организмов — змей, червей, рыб, птиц, насекомых и других типах роботов бионического происхождения.
Робот Tuna
Система распознавания образов
Системы распознавания уже способны определять простые трехмерные предметы, их ориентацию и композицию в пространстве, а также могут достраивать недостающие части, пользуясь информацией из своей базы данных (например, собирать конструктор Lego).
Двигатели
В настоящее время в качестве приводов обычно используются двигатели постоянного тока, шаговые электродвигатели и сервоприводы.
Существуют разработки двигателей, не использующих в своей конструкции моторов: например, технология сокращения материала под действием электрического тока (или поля), которая позволяет добиться более точного соответствия движения робота натуральным плавным движениям живых существ.
Математическая база
Робот Aibo
Помимо уже широко применяющихся нейросетевых технологий, существуют алгоритмы самообучения взаимодействию робота с окружающими предметами в реальном трёхмерном мире: робот-собака Aibo под управлением таких алгоритмов прошел те же стадии обучения, что и новорожденный младенец, самостоятельно научившись координировать движения своих конечностей и взаимодействовать с окружающими предметами (погремушками в детском манеже). Это дает ещё один пример математического понимания алгоритмов работы высшей нервной деятельности человека.









Навигация
Системы построения модели окружающего пространства по ультразвуку или сканированием лазерным лучом широко используются в гонках роботизированных автомобилей (которые уже успешно и самостоятельно проходят реальные городские трассы и дороги на пересечённой местности с учётом неожиданно возникающих препятствий).
Внешний вид
В Японии не прекращаются разработки роботов, имеющих внешний вид, на первый взгляд неотличимый от человеческого. Развивается техника имитации эмоций и мимики «лица» роботов.
В июне 2009 года ученые Токийского университета представили человекоподобного робота «KOBIAN», способного выражать свои эмоции — счастье, страх, удивление, грусть, гнев, отвращение — с помощью жестов и мимики.
Робот KOBIAN
Робот способен открывать и закрывать глаза, двигать губами и бровями, использовать руки и ноги.
Производители роботов
Существуют компании, специализирующиеся на производстве роботов (среди крупнейших — iRobot Corporation). Роботов также выпускают некоторые компании, работающие в сфере высоких технологий: ABB, Honda, Mitsubishi, Sony, World Demanded Electronic, Gostai, KUKA.
Требования к разработчикам сценариев
Подходы к разработке
Любой сценарий и состоит из действий (Activity). Они выполняют полезные операции: кликнуть мышкой, присвоить переменной значение, объединить файлы pdf в один и т.п. В их свойствах разработчик сценария уточняет, как именно нужно выполнить действие.
Вендоры платформ предлагают большой набор готовых действий, что позволяет «программировать квадратиками» без навыков разработки.
Некоторые платформы RPA предоставляют возможность использовать только заранее предусмотренные вендором действия.
Некоторые – предусматривают возможность расширения за счет:
-
Подключаемых пакетов
Когда необходимо выполнить действие, не предусмотренное базовым набором, разработчик открывает встроенный менеджер пакетов и ищет пакет с нужным действием. -
Внедрения в проект целых вставок кода на поддерживаемых языках
Понравится опытным программистам. -
Использования в свойствах действий выражений на поддерживаемых языках
вместо конкретных значений и переменных. Это может заменить целые блоки действий и позволяет более точно настроить операции.
Обучение
Технология RPA легка в освоении, общий принцип работы в большинстве случаев интуитивно понятен.
Хорошо, если вендор поддерживает портал с актуальной документацией и форум, где можно найти ответы на многие вопросы.
Для некоторых платформ также есть специальные порталы с обучающими курсами и возможностью получения сертификатов. Там клиенты могут самостоятельно обучать своих сотрудников… вырвав их из рабочего процесса на несколько недель.
Ключевые навыки
Каким же должен быть разработчик сценариев RPA? Не обязательно опытным программистом, это мы уже выяснили.
Работа с заказчиками, обследование процессов, поиск обходных решений, предложение лучшего варианта реализации, анализ возможных точек сбоя, разработка алгоритмов как в части сценария, так и в части формализации бизнес-процесса – для этого нужно быть прежде всего аналитиком. Подход «просто делать что сказали» здесь работает плохо.
Если сузить вопрос до перечисления навыков и технологий, то это прежде всего:
-
Уверенное понимание:
-
Типов данных
Для начала вполне хватит базовых: строки, числа, даты, булевые, массивы.
Интерес ко всяким DataTable, Attachment и Dictionary придет в процессе работы. - Циклов и условных переходов
- Управления исключениями
-
Структуры XML+HTML
это необходимо для тонкой настройки целей для действий в экранных формах - Синтаксиса RegEx
-
Типов данных
- Хорошее чувство читаемости кода / сценария
- Базовые навыки администрирования операционной системы и в целом ориентирование в IT
Следующие навыки менее важны, требуются не всегда и/или придут с опытом:
-
SQL
на уровне выборок, манипулирования данными, создания простых процедур и функций -
JSON
Как для использования в веб-сервисах, так и просто для хранения и передачи данных в сценариях. - REST и SOAP запросы
-
VBA
на уровне «найти подходящий пример и адаптировать» - Языки программирования, поддерживаемые платформой
Моделизм
Существует направление моделизма, которое подразумевает создание как радиоуправляемых, так и автономных роботов.
Проводятся соревнования по нескольким основным направлениям.
- DARPA Grand Challenge — соревнования автоматических автомобилей.
- «Битвы роботов» (англ. Robot Wars) — телешоу соревнований между роботами (Великобритания, 1998—2004).
- Первые Олимпийские игры роботов-андроидов 2010 (21—23 июня 2010 года, Харбин).
Российские соревнования мобильных роботов:
- Молодёжный научно-технический фестиваль «Мобильные роботы»
- Российская национальная лига евробот
- «Робофест» в Москве
К соревнованиям автономных роботов относятся: перемещение по контрастной полосе на скорость, борьба сумо, футбол роботов.
Шагающий робот, собранный из набора Robotis Bioloid
Изобретатель Пит Редмонд (Pete Redmond) создал робота RuBot II, который может собрать кубик Рубика за 35 секунд. А в 2016 году робот Sub1 собрал кубик Рубика за 0,637 секунды.
Робоофициант

Роботы массово обучаются искусству принимать заказы и носить тарелки от столика к столику. Так компания Pizza Hut объявила о своем намерении нанять на работу гуманоида по имени Pepper Robot. Пока новоявленный официант не способен понимать речь – чтобы сделать заказ, клиенту пиццерии достаточно будет скачать приложение, зарегистрировать в нем свою карту с услугой Masterpass и осуществить синхронизацию с роботом.
А как быть, если некому принести стакан воды дома? Можно последовать примеру немецких ученых, которые научили робота доставать из холодильника напиток – правда, не воду, а алкоголь. TIAGo успешно справляется с задачей и приносит пиво хозяину.
Еще одна модель робота-официанта, которую можно купить за 20 с лишним тысяч долларов уже сегодня, – Serving Cart от компании Florida Robotics. Он выглядит менее человекоподобным, чем TIAGo, зато куда более расторопен. Робот представляет собой автономную систему сервировки стола: он подает блюда и умеет издавать различные забавные звуки. Благодаря системе навигации официант свободно снует среди гостей без риска разбить тарелку или пролить напиток. Заряда батареи хватает на сутки, а видео с встроенной камеры робота можно транслировать на экраны в режиме реального времени – это однозначно произведет впечатление на присутствующих.
Области робототехники
Применяются роботы самых различных сферах, но основными являются следующие:
- Промышленность: промышленные роботы;
- Исследовательская деятельность: роботы-ученые, исследователи;
- Боевые роботы: безпилотники, роботы-саперы, охрана и безопасность;
- Нанотехнологии: микро- и нано-роботы в исследовательских и медицинских целях;
- Домашние технологии: бытовые роботы, пылесосы, мойщики окон и персональные.

В сфере промышленности роботы позволяют выполнять большой объем работ с высокой скоростью и точностью. Они позволяют решать такие задачи, с которыми невозможно справиться человеческими силами.









Очень многие места нашей планеты и за ее пределами не исследованы по той причине, что делать это человеку невозможно. Например, о том, что творится в океанных глубинах и в космосе мы знаем благодаря роботам-исследователям.
Понятия робот и робототехника
Термин «робот» ввел чешский писатель Карел Чапек, использовав его в своем произведении «Универсальные роботы Россума». В переводе с чешского «robota» означает — рабство, работа. Вот и в романе Чапека роботы были рабами, созданными человеком.
Слово «робототехника» обязано своим появлением американскому писателю российско-еврейского происхождения Айзеку Азимову, который внес немалый вклад в популяризацию науки.
История появления роботов берет начало с появления первых механических машин андроидного типа, а развитие робототехники, как отрасли, начинается с первых индустриальных конвеерных роботов, использующихся на производствах.
ТОП 4 работающих программ — роботов для трейдинга на бирже Forex
Generic A-TLP – популярный робот — скальпер
Перед нами популярный мультивалютный скальпер, работающий с азиатской торговой сессией и таймфреймом М15.
Сделки роботом осуществляются в период, когда цена двигается вопреки основному трендовому движению. Ордера открываются по классической схеме – когда происходит отскок котировки от стенки канала на установленное количество пунктов. Закрытие осуществляется основываясь на индикаторе Боллинджера (разные варианты – стоп, тейк, отступы от стенок каналов).
Достоинство Generic A-TLP также в том, что он относительно безопасен – в нем не задействовали Мартингейла или сетку ордеров. Единственный минус – нечастая торговля, поэтому в случае необходимости быстро разогнать депозит он будет неэффективен.
Скачать 100% работающий советник Generic A-TLP
Обзор советника Generic A-TLP
Silent Ilan – автоматическая программа — робот для торговли на бирже Форекс
Отличное решение для круглосуточной работы с таймфреймом М5 и любыми валютными парами. Тем не менее, создатель утверждает, что его робот достигнет лучших показателей лишь с парой EUR/AUD.
Важно понимать, что использование данной программы несет потенциальный риск больших убытков в случае высокой волатильности рынка, так как в ней применяется Мартингейл – то есть, убыточная сделка приводит к росту объема последующей. Впрочем, для многих трейдеров этот недостаток с лихвой компенсируется высокой доходностью.. Выход на торги роботом осуществляется по данным, которые предоставляет технический индикатор RSI и анализатор Ozymandias, являющийся также фильтром убыточных сделок
Изменять стандартные настройки не рекомендуется, так как это часто приводит к ухудшению эффективности и уходу счета в минус
Выход на торги роботом осуществляется по данным, которые предоставляет технический индикатор RSI и анализатор Ozymandias, являющийся также фильтром убыточных сделок. Изменять стандартные настройки не рекомендуется, так как это часто приводит к ухудшению эффективности и уходу счета в минус.
Скачать обновлённую программу Silent Ilan
Оптимизация и настройка Silent Ilan
ЛУЧШИЕ ФОРЕКС БРОКЕРЫ, ПО ДАННЫМ РОССИЙСКОГО РЕЙТИНГА НА 2020 ГОД:
1998 год. FCA, НАУФОР. ВОЗВРАЩАЕМ 20% ОТ ТОРГОВЛИ | обзор / отзывы
2007 год. FinaCom. КЕШБЭК 16$ С ЛОТА! | обзор / отзывы
2007 год. 260 представительств.
STARTUP БОНУС $1500 | обзор / отзывы
1997 год. Нацбанк РБ. ИЗ 50$ ДО 5.000$ | обзор / отзывы
А ТАКЖЕ ЛУЧШИЕ БРОКЕРЫ БИНАРНЫХ ОПЦИОНОВ НА СЕГОДНЯ:
Самые выгодные условия!
ТОРГОВЛЯ БЕЗ ВЕРИФИКАЦИИ | обзор / отзывы
Обновленные платформы.
ОТКРЫТЬ СЧЕТ В BINARY | обзор / отзывы
Equilibrium – торговля на Форекс с помощью стабильной программы-робота
Яркий представитель категории “трендовый робот”, действующий на таймфреймах М15 и Н1. Наиболее эффективным считается в сочетании с валютными парами EUR/USD и GBP/USD. Если трейдеру нужно организовать круглосуточную торговлю – это отличный вариант, причем не обязательно использовать домашнюю систему (его можно запускать и на арендованных VPS-серверах).









Торговля происходит на основе краткосрочных трендовых движений в пределах основных рыночных тенденций. Заключая сделки, Эквилибриум опирается на сигналы технических индикаторов, которое помогает определить идеальный момент выхода на торги.
Большим плюсом данного торгового робота является стабильность и безопасность – усреднение и связанные с ним методики отсутствуют как таковые. Кроме того, если вдруг была допущена просадка, программа помогает восстановить все в довольно сжатые сроки.
скачать советник Equilibrium
Обзор и применение робота Equilibrium
Какие бывают типы роботов:
Промышленные роботы
– выполняют различные производственные задачи. Всегда есть устройство управления – контроллер, может включать в себя манипулятор, сервопривод, различные сенсоры, пневмоцилиндры и многое другое. Все зависит от того, что делают на этом производстве. Например — склады, логистика здесь требуются конвейеры, штабелеры и т.д. Выполняют различные технологические операции, перемещение предметов, обработку материалов.

Медицинские роботы
– наиболее известный хирургический робот «Да Винчи». Он управляется несколькими операторами хирургами. При его помощи проводят высокоточные операции. По своей сути это управляемый манипулятор. Обычно медицинские роботы совсем не похожи на людей. Также есть роботы, которые выполняют отдельные функции, например, массаж или внутривенные инъекции, терапевтические функции и прочее. Для более точечных операций идет разработка нано-роботов. Они смогут вводиться внутрь человеческого организма.

Бытовые роботы
– облегчают жизнь человеку. Это роботы, выполняющие функции секретаря, уборки помещений, роботы животные. Например робот-собачка, способная выполнять некоторые команды, роботы-пылесосы и другие.
Робот, которые обеспечивают безопасность.
— широко используются силовыми структурами. Это системы контроля доступом, автоматические устройства пожаротушения. МЧС и полиция используют беспилотники-дроны, подводных роботов для предотвращения пожаров и глубоководных работ.
Боевые роботы
— являются как правило дистанционно управляемыми и предназначены для замены человека в особо опасных и боевых ситуациях. Это роботы-минеры, роботы-саперы, роботы разведчики. Автономные боевые роботы пока находятся в стадии разработки.
Роботы учёные
– постепенно начинают использоваться для научных исследований и разработок. Для них используют все более совершенные алгоритмы управления. Роботы уже в состоянии проводить научные эксперименты, опыты, анализировать различные процессы, делать прогнозы и выдвигать теории. Эти роботы могут работать без перерыва, у них нет амбиций, они не могут обманывать и утаивать информацию. Также роботы лишены субъективной оценки своей работы.
Робот учитель
– может выполнять многие задачи, которые выполняет современный учитель. Он может читать вслух, общаться на многих языках, выдавать задания. Но пока не может распознавать эмоции человека, думать, как человек. Такой робот-учитель лишен индивидуального подхода к учащимся. У него сложности с мотивацией учеников и управлением классом.
Мы видим что различных типов роботов достаточно много и тому что такое робот можно дать много определений. Но пока у всех роботов отсутствует эмоциональная составляющая, пока это только управляемые программируемые механизмы. Этот перечень роботов далеко не полный. Каждый тип роботов также подразделяется на множество видов. С каждым годом мир роботов становится все больше и разнообразнее.
Следующая запись Шаг 1. Начало изучения робототехники